
O passatempo FPV (first-person view) oferece aos pilotos de drones e RC a oportunidade fascinante de controlar os seus aviões como se estivessem sentados no cockpit. A tecnologia de vídeo desempenha um papel central neste processo: uma câmara montada no dispositivo transmite a imagem ao piloto em tempo real, permitindo-lhe controlar a aeronave a partir de uma perspetiva na primeira pessoa. Esta experiência imersiva é o que torna o voo FPV tão apelativo e requer um sinal de vídeo fiável e estável para manter um controlo preciso.
No atual cenário de FPV, os sistemas de vídeo digital eclipsaram grandemente os sistemas analógicos que eram amplamente utilizados. Os sistemas FPV digitais oferecem vantagens claras, nomeadamente em termos de qualidade de imagem significativamente superior e de transmissão estável e resistente a interferências. Os sistemas digitais mais conhecidos, como os da DJI ou da Walksnail, fornecem imagens nítidas de 720p ou mesmo 1080p e permitem uma ligação muito estável a longas distâncias. Estes sistemas digitais não só provaram a sua eficácia no sector do estilo livre, como também em voos de longo alcance, onde a transmissão fiável é crucial.
No entanto, há sempre abordagens inovadoras para desenvolver ainda mais a tecnologia de transmissão de vídeo no passatempo FPV. Um desses desenvolvimentos interessantes é o OpenIPC. O OpenIPC é um firmware de código aberto que foi originalmente desenvolvido para câmaras IP e está agora a ser aplicado à FPV. Embora ainda esteja em desenvolvimento e não atinja atualmente o mesmo nível de desempenho que os sistemas comerciais, oferece uma oportunidade interessante para tornar o passatempo ainda mais aberto.
As câmaras baseadas em IP oferecem teoricamente uma grande flexibilidade: permitem a personalização e configurações individuais que muitas vezes não são possíveis com os sistemas comerciais. Além disso, o OpenIPC poderá ser uma alternativa económica no futuro, continuamente melhorada pela comunidade. este protocolo é semelhante ao protocolo de controlo ExpressLRS (ELRS). No entanto, a tecnologia ainda não está suficientemente madura para tirar o máximo partido da experiência FPV. Em especial em domínios como a latência e a estabilidade, ainda é necessário fazer progressos para acompanhar os sistemas estabelecidos.
No entanto, o OpenIPC mostra o potencial de como os projectos de código aberto podem influenciar o mercado da FPV e criar formas alternativas de os pilotos personalizarem e individualizarem os seus sistemas.
Embora o OpenIPC ainda esteja a ser desenvolvido como firmware de código aberto, já existem alguns produtos FPV interessantes que podem ser utilizados em combinação com este software. Dois produtos, em particular, causaram uma grande agitação na comunidade FPV: o EMAX Wyvern Link e o RunCam WiFiLink. Ambos os sistemas são baseados no OpenIPC, o que os torna opções interessantes para os pilotos de FPV que estão interessados em experimentar.
Nota: Atualmente, só existem versões alfa dos sistemas apresentados abaixo. Não se deve esperar um produto de alta qualidade e sem falhas. Os fabricantes estão a colocar estes sistemas no mercado para dar a mais pessoas a oportunidade de continuar a desenvolver sistemas OpenIPC. E não para vender um produto perfeito.
O EMAX Wyvern Link é um transmissor (VTX) e recetor (VRX) de vídeo digital compatível com o OpenIPC, concebido para pilotos de FPV que procuram uma alternativa económica aos sistemas FPV digitais proprietários. O recetor oferece uma potência máxima de transmissão de até 2W na versão mais potente, o que, em combinação com o transmissor mais potente (800mW), deverá permitir um alcance significativo e estabilidade na transmissão de vídeo. E sim, o recetor também transmite com sistemas digitais e vice-versa. É por isso que, como Joshua Bardwell já referiu, preferimos chamar ao recetor Groundunit e ao emissor Airunit.
Até agora, a EMAX é também o único fabricante no sector da FPV a oferecer quatro produtos OpenIPC diferentes. Para além dos componentes de alto desempenho acima descritos, estes também incluem produtos mais baratos que são mais susceptíveis de serem utilizados em helicópteros mais pequenos que requerem menos energia para a transmissão.
A qualidade da imagem está atualmente limitada a 720p (120 fps) a cerca de 4 Mbps, o que é visivelmente inferior aos sistemas de alta resolução da DJI ou da Walksnail (25-50 Mbps). Isto leva a bloqueios em cenas de movimento rápido e reduz a nitidez da imagem durante manobras rápidas.

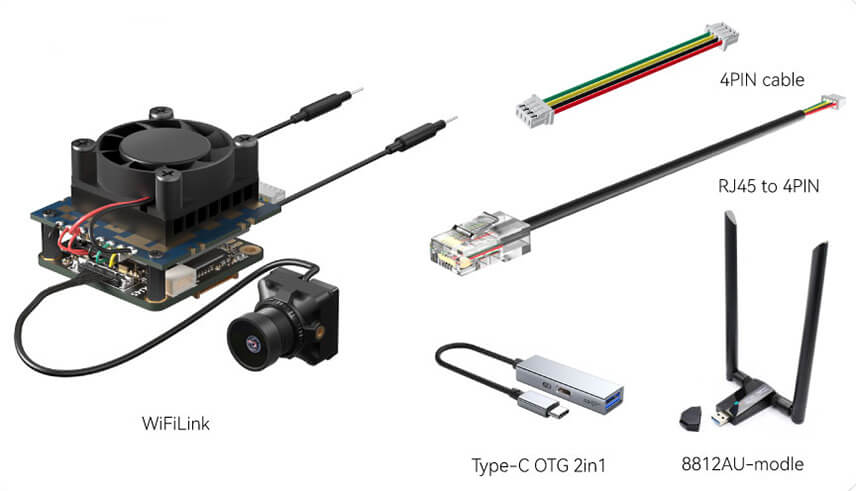
O RunCam WiFiLink é outro produto compatível com o OpenIPC que se baseia na tecnologia de transmissão de vídeo baseada em Wi-Fi. Em termos de tecnologia de transmissão, é muito semelhante ao sistema EMAX, mas também oferece a opção de transmissão Full HD. No entanto, a taxa de fotogramas é reduzida para 60 fps.
Tal como acontece com o EMAX, o sistema ainda não é adequado para aplicações profissionais, uma vez que as soluções baseadas em WiFi são mais susceptíveis a problemas de latência e quedas de sinal do que as ligações sem fios tradicionais de 5,8 GHz.
Com a RunCam WiFiLink, a estação terrestre também tem um aspeto ligeiramente diferente do EMAX. A receção é efectuada através de um módulo WiFi "clássico", que é ligado a um smartphone através de USB OTG e reproduz a imagem recebida.
No geral, o OpenIPC oferece uma latência aceitável de cerca de 25 ms, o que é próximo ao DJI FPV V1. Para os pilotos que querem experimentar mais além da tecnologia, o EMAX e o RunCam oferecem plataformas promissoras, mas atualmente não funcionam com o mesmo nível de estabilidade que os sistemas estabelecidos.
Para ajudar no desenvolvimento do OpenIPC, a comunidade pode envolver-se de várias formas:
Os utilizadores podem instalar o OpenIPC em dispositivos compatíveis e testá-lo exaustivamente. O feedback sobre bugs, flutuações de desempenho ou potenciais melhorias é essencial para otimizar o firmware. Esse feedback pode ser partilhado diretamente em plataformas como o GitHub ou em fóruns FPV especiais.
Qualquer pessoa com experiência em programação (especialmente em C, C++ ou Python) pode contribuir ativamente para melhorar o código. O OpenIPC é um projeto de código aberto acessível ao público no GitHub. Os programadores podem acrescentar novas funcionalidades, corrigir erros existentes e melhorar a documentação.
O apoio através de contribuições financeiras ajuda a equipa do OpenIPC a avançar com o desenvolvimento, a realizar testes de hardware e a cobrir os custos do servidor.
A participação em fóruns, redes sociais e grupos Discord ajuda a divulgar conhecimentos e a apoiar outros utilizadores durante a instalação e a utilização. Este tipo de manutenção da comunidade é essencial para criar uma comunidade de utilizadores em crescimento.
Em conclusão, estamos ansiosos por ver até onde nos levará o percurso dos sistemas OpenIPC no mundo da FPV. Quais os produtos que irão existir, quais os fabricantes que irão aderir e até que ponto os produtos OpenIPC serão competitivos em comparação com os sistemas estabelecidos, como o DJI ou o Walksnail. Talvez os produtos estejam disponíveis em breve na nossa loja.
Fontes: OpenIPC, Oscar Liang, Joshua Bardwell, RunCam, EMAX











