Ano novo, construção nova! Neste artigo, vamos mostrar-lhe como montar um drone FPV HD de 5 polegadas para filmagens cinematográficas e freestyle e o que precisa para o fazer.
Todas as peças utilizadas estão, naturalmente, disponíveis na nossa loja e é uma grande ajuda para nós se passar por lá. Obrigado!
Esta publicação do blogue também está disponível em vídeo. Basta clicar no play acima ou dar uma vista de olhos no nosso canal do YouTube.
Precisamos de vários componentes importantes para construir o nosso drone FPV. Os blocos de construção básicos incluem o quadro, que forma a estrutura do drone, e o recetor, que recebe os sinais de controlo. Quatro motores accionam as hélices, enquanto o transmissor de vídeo e a câmara transmitem a imagem em direto para os óculos de FPV. O controlador de voo, o "cérebro" do drone, e o controlador, que controla a alimentação eléctrica dos motores, também são necessários.
Para construir um drone FPV, são necessários estes componentes:

Para receber a imagem de vídeo, recomendamos os óculos Walksnail Avatar Goggles X, um dos óculos de FPV HD mais populares. Para o controlo remoto, usamos o Jumper T20 V2. O rádio a utilizar não é muito importante. No entanto, ele deve suportar o protocolo de transmissão ELRS. A bateria utilizada é uma bateria LiPo 6S da China Hobbyline, uma vez que estamos a construir um helicóptero compatível com 6S.
Este é o equipamento que utilizámos:
Também vai precisar de uma seleção de ferramentas para a construção. Um ferro de soldar é essencial, de preferência uma estação de soldadura adequada, bem como solda. Pode ser utilizado um isqueiro ou uma pistola de calor para encolher os tubos termorretrácteis. As abraçadeiras são práticas para várias aplicações, tal como os descascadores de fios para os cabos maiores, os cortadores laterais e os alicates de pontas pequenas para os cabos mais pequenos. Necessitará de uma ferramenta para montar as hélices. A ferramenta mais importante já está incluída na prática mala de ferramentas Ethix.
Uma ferramenta útil para todos os pilotos FPV:
Agora que já tirámos isso do caminho, é altura de construir o drone FPV.
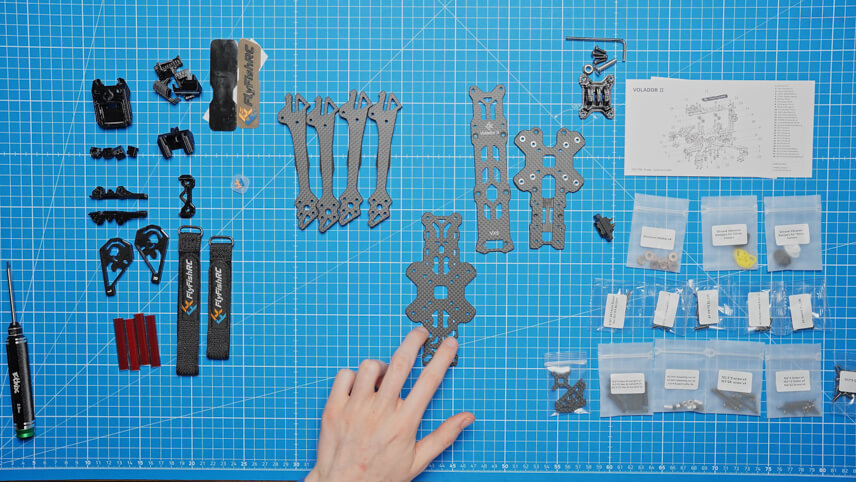
Comecemos por montar a estrutura. Em primeiro lugar, desembale todas as peças para ter uma boa visão geral. Coloque os quatro braços da estrutura de modo a formarem uma cruz no centro. Uma pequena peça adicional ajuda a fixar os braços no centro, o que facilita a sua aparafusagem posterior. Pressione esta peça adicional firmemente no centro, de modo a que os braços fiquem juntos.
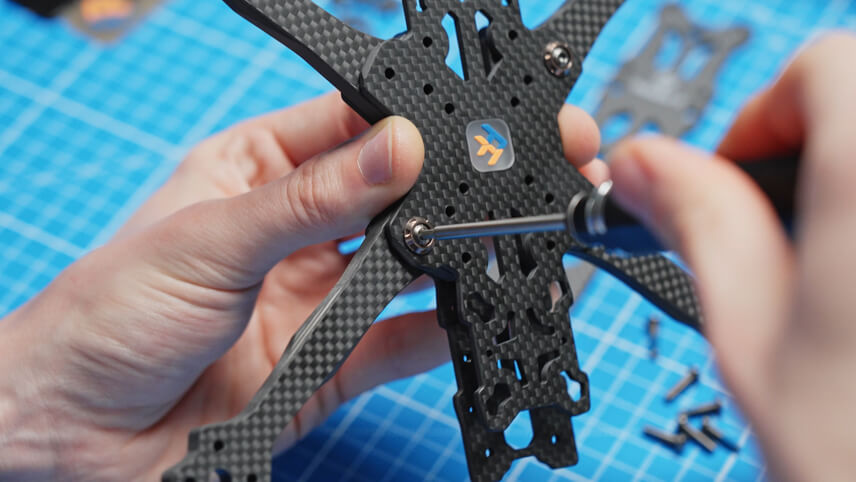
Precisas de parafusos M3x12 para fixar os braços. Vira o helicóptero e certifica-te de que o logótipo FlyFish está posicionado corretamente. Utiliza anilhas de alumínio para fixar os braços. Utiliza primeiro os orifícios exteriores e depois os parafusos M3x28 mais compridos para os orifícios interiores. Deixe estes parafusos soltos até que todos os parafusos estejam colocados, depois aperte-os.
Assim que todos os parafusos estiverem apertados, entram em ação as primeiras peças de TPU impressas em 3D. Primeiro, monta um suporte de antena na parte de trás. Utilize parafusos M2x12 e uma chave de fendas hexagonal de 1,5 mm para aparafusar o suporte na estrutura a partir de baixo. Mais uma vez, deixe tudo solto e aperte apenas no final.
Em seguida, montamos o suporte da câmara. Este é composto por duas placas de carbono, duas peças de alumínio e um pequeno rebordo em TPU. Primeiro, pressione as placas de carbono na estrutura. Depois, prenda as peças de alumínio às placas de carbono, mas aperte-as apenas ligeiramente, para que a câmara ainda caiba entre elas.

Agora é a vez dos standoffs, os espaçadores para os diferentes níveis da estrutura. Existem diferentes tamanhos: grande, ligeiramente mais pequeno e muito pequeno para o suporte do GPS. Primeiro, fixe os espaçadores grandes à estrutura a partir de cima, utilizando parafusos M3x16. Dois são colocados no centro da estrutura e outros dois na parte de trás. Os suportes mais pequenos, que se fixam com parafusos M2,5x9, ficam na parte de trás.
Agora vamos preparar os motores. Usamos os motores iFlight Xing2 2306 com 1755 KV. Primeiro, pressione os protectores de braços TPU nos braços da estrutura para proteger o carbono e os motores. Depois, pegue num motor, segure-o no braço e aperte lentamente os primeiros parafusos. Certifique-se de que o motor fica direito no braço para não danificar a rosca. Deve também certificar-se de que os parafusos não tocam nos enrolamentos do motor. Repita este passo para os quatro motores.

Agora é a vez do controlador de voo e do ESC. Primeiro, tire tudo da embalagem: o conetor XT60, os parafusos, os cabos sobressalentes e os amortecedores de silicone. O controlador, também conhecido como ESC, é o chip ao qual todos os motores estão ligados. O controlador de voo é o "cérebro" do drone, ao qual todos os componentes são posteriormente ligados.
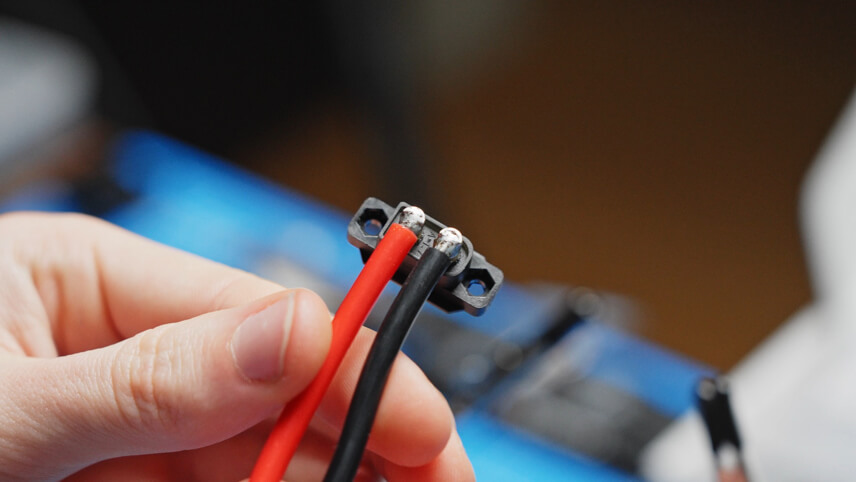
Para ligar os cabos do conetor XT60 num ângulo de 90°, começamos por soldar previamente os contactos do conetor. De resto, utilizamos o conetor XT60 que acompanha a estrutura.
Os cabos também são pré-estanhados. Em seguida, soldamos os cabos aos contactos do conetor XT60. Certifique-se de que nada toca entre os dois contactos.
O condensador é colocado na estrutura a partir de baixo, com o positivo soldado ao positivo e o negativo ao negativo. Tivemos de arranjar um condensador mais pequeno (em termos de tamanho), pois o do variador não cabe na estrutura.
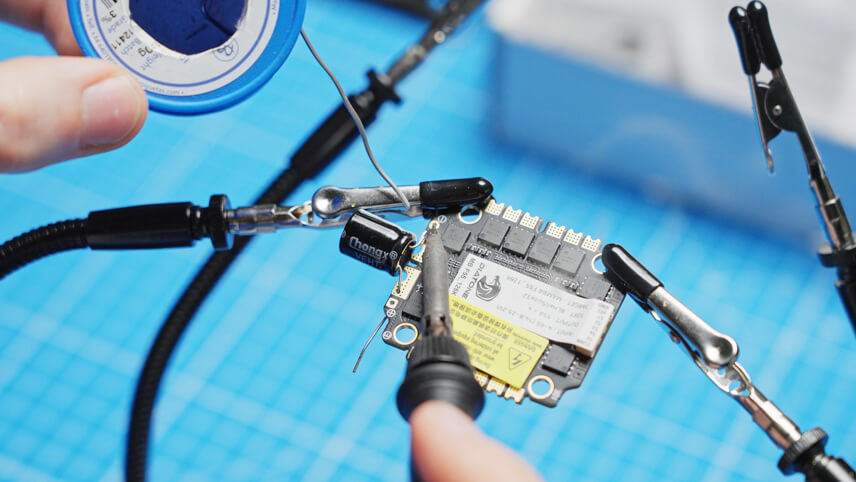
Corte as pernas salientes do condensador. Depois, pode preparar os pontos de soldadura para os cabos de alimentação do variador e soldar também os cabos de alimentação.
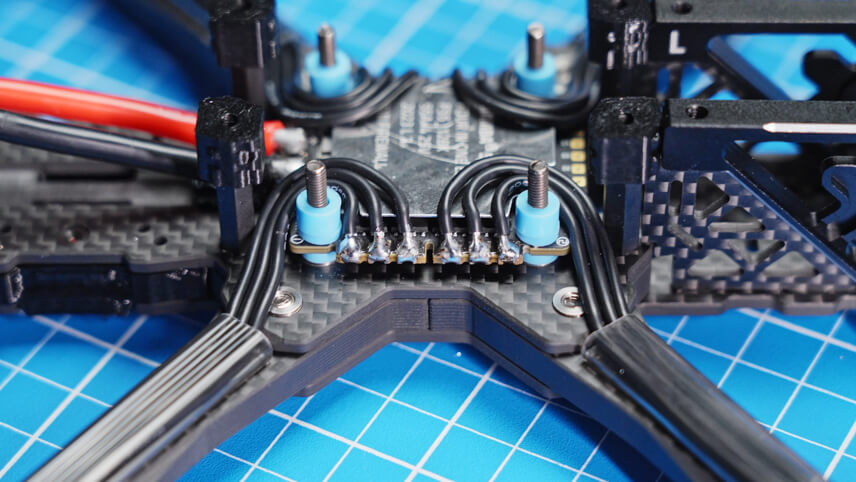
Agora montamos o variador na estrutura. Para o efeito, puxe os amortecedores de silicone através dos orifícios da estrutura. As três ligações por motor estão pré-soldadas. Em seguida, coloque os protectores dos cabos do motor e insira os cabos através destes protectores antes de os soldar ao variador. É importante que os cabos não se toquem uns aos outros e que estejam apenas ligados à respectiva almofada de solda.
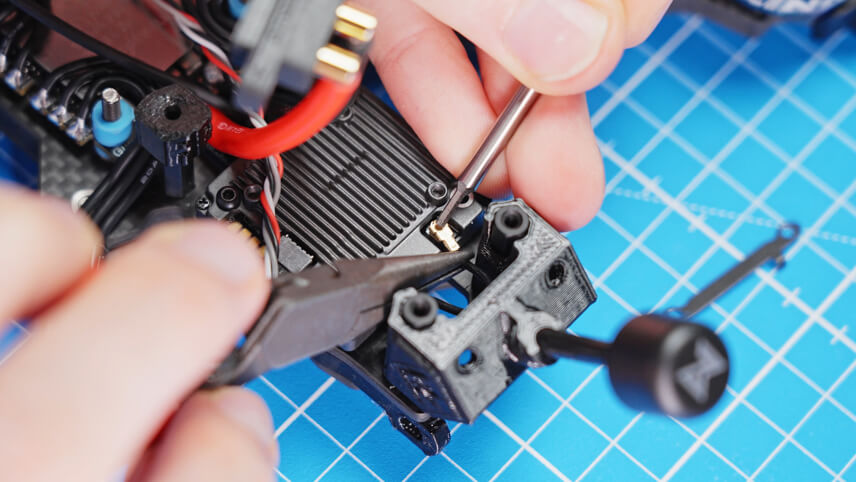
O próximo passo é o sistema transmissor de vídeo. Utilizamos o Walksnail Avatar HD Kit V2, composto por antena, transmissor de vídeo e câmara. O transmissor de vídeo é montado na parte de trás da estrutura e a câmara na parte da frente. Os cabos são colocados de modo a que o transmissor de vídeo possa ser posicionado corretamente. Utilize os parafusos e anilhas fornecidos para aparafusar o transmissor de vídeo no seu lugar.
Retire a placa de cobertura do transmissor de vídeo para expor a ligação U.FL. Fixe a antena no suporte e ligue a antena ao transmissor de vídeo. Volte a colocar a placa e aperte os parafusos.
Para ligar o transmissor de vídeo ao controlador de voo, solde o cabo vermelho ao bloco de 9V, o cabo preto ao bloco GND, o cabo TX cinzento ao bloco RX3 e o cabo RX branco ao bloco TX3 do controlador de voo. Certifique-se de que o RX e o TX estão ligados corretamente para garantir uma comunicação sem problemas. O diagrama exato pode ser encontrado nas instruções do FC e do transmissor de vídeo.
O transmissor de vídeo está agora completamente instalado e o conetor XT60 pode ser pressionado nos espaçadores na parte traseira.
Insira os amortecedores de silicone na parte lateral do controlador de voo e ligue o cabo do controlador ao controlador de voo. Monte o controlador de voo na estrutura e fixe-o com as porcas fornecidas.
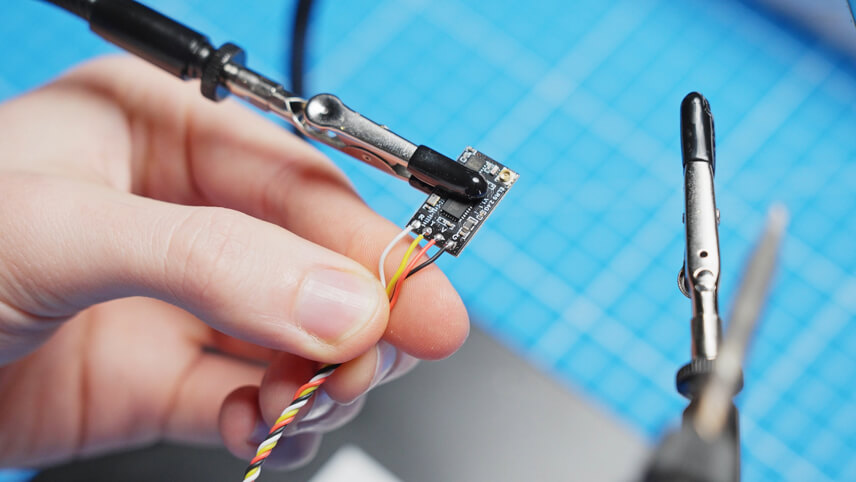
Agora, o recetor está instalado. Utilizamos um recetor ELRS, que é ligado de forma semelhante ao transmissor de vídeo. Consulte as instruções para encontrar a atribuição correta das ligações. Normalmente, as ligações são GND (preto), 5V (vermelho), TX (cinzento) e RX (branco). Estes cabos são soldados à ligação UART1 do controlador de voo: TX a RX, RX a TX, 5V a 5V e GND a GND. O tubo retrátil protege tanto a placa como os cabos. Monte o recetor atrás da câmara, puxando a antena por baixo da câmara e fixando tudo com braçadeiras. Em alternativa, pode utilizar fita adesiva de dupla face.
O passo seguinte é a montagem da placa superior. Para o efeito, são utilizados vários parafusos: parafusos M2.5 na parte de trás, parafusos de cabeça escareada no centro e parafusos com uma cabeça mais larga para o suporte da GoPro na parte da frente. Estes parafusos especiais evitam que o TPU se rasgue em caso de queda. Aperte todos os parafusos, mas não exagere para evitar danos. Monte também a almofada da bateria, alinhando-a corretamente e pressionando-a para baixo para evitar que a bateria escorregue.
Antes de passarmos à configuração do software, vamos testar o sistema eletrónico. Ligar um dispositivo de fecho de fumo entre a bateria e o drone para detetar eventuais ligações erradas sem danificar os componentes. Quando todos os LEDs do recetor, do controlador de voo e do transmissor de vídeo se acenderem, está pronto para a configuração.

Para configurar o helicóptero, necessita de dois programas no seu computador: o configurador ExpressLRS para o recetor e o configurador Betaflight para o controlador de voo.
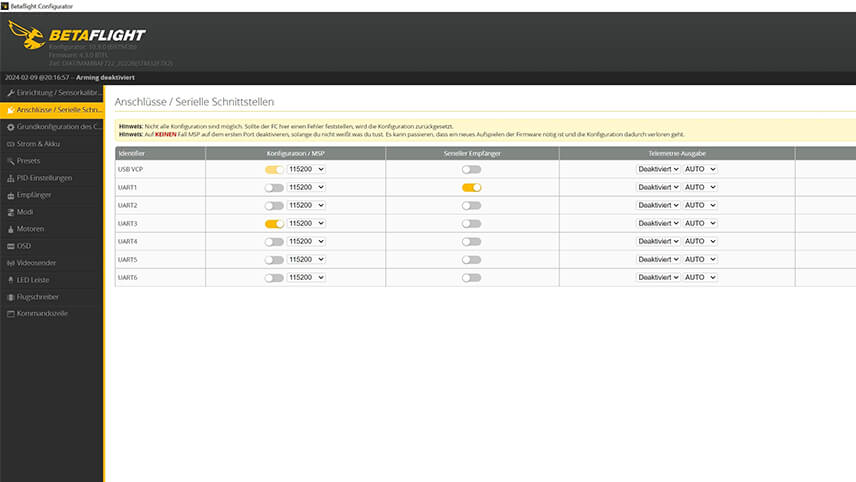
Começa com o Betaflight. Ligue-se ao controlador de voo e certifique-se de que o recetor está definido para UART1 e o transmissor de vídeo para UART3. Active as ligações correspondentes e guarde a configuração.
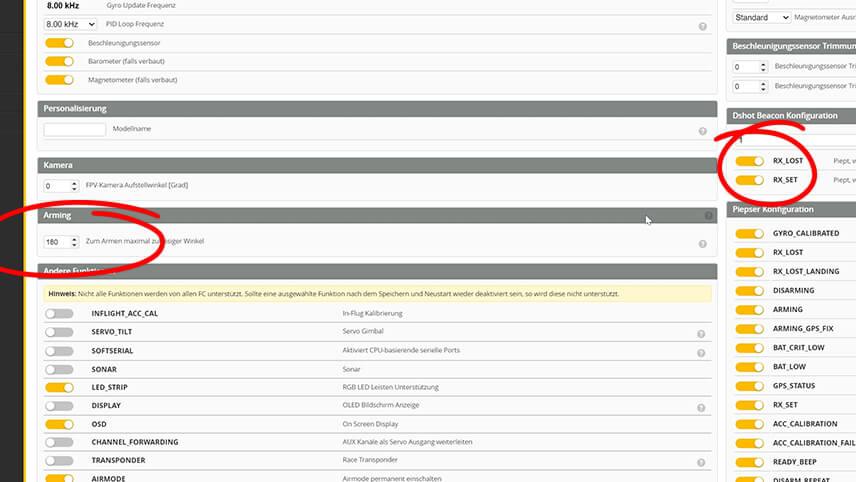
Na configuração de base, definir o ângulo de armamento em 180° para que o drone possa descolar em qualquer direção. Ativar RX_LOST e RX_SET para que os motores emitam um sinal sonoro em caso de perda de ligação. Guardar as definições. Em "Receiver", selecionar CRSF, o protocolo de receção ELRS.
Mudar para o configurador ExpressLRS. Selecione a versão correta e o recetor adequado. Ligar e instalar o firmware. Isto pode demorar alguns minutos. Se a instalação foi bem sucedida, pode voltar a mudar para o Betaflight e testar a ligação. Mova os sticks no controlo remoto e verifique se as deflexões são visíveis no Betaflight.
Muda para os modos de voo no Betaflight e adiciona os modos Pre-Arm, Arm e Angle. Atribua os interruptores correspondentes no seu controlo remoto, clicando em "Add Range" e movendo os interruptores. Certifique-se de que os intervalos estão corretamente definidos para que os modos só estejam activos quando os interruptores forem acionados. Guarde as definições e teste se os interruptores são apresentados corretamente na Betaflight quando os move no controlo remoto.
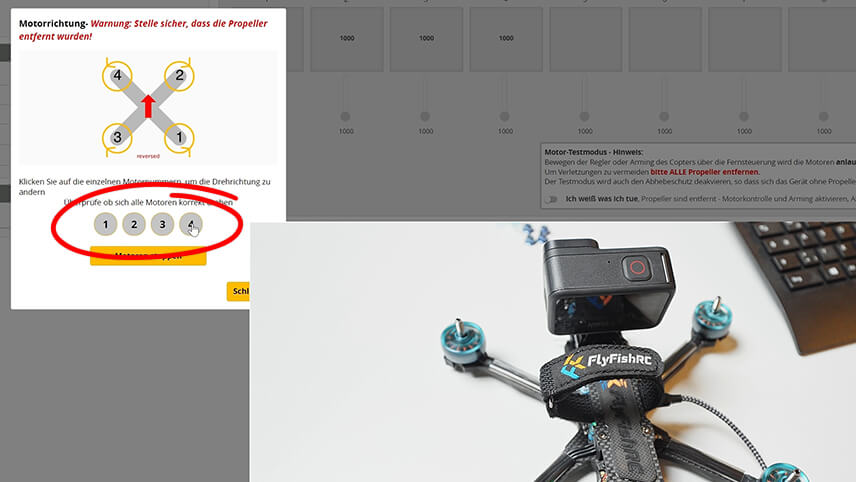
No separador "Motors" da Betaflight, verifique o sentido de rotação dos motores. Certifique-se de que as hélices estão removidas e active o interrutor que ativa o controlo do motor. Liga a bateria e assinala a caixa "Reverse motors". Porque queremos que as hélices saiam do sentido de rotação. Teste o sentido de rotação dos motores e clique no número do respetivo motor para alterar o sentido de rotação, se não estiver correto. Guarde as definições e certifique-se de que todos os motores rodam como pretendido.
No OSD (On-Screen Display), defina os elementos que devem ser apresentados nos óculos de proteção. Active a tensão média da célula, o modo de voo, os temporizadores 1 e 2, bem como o valor RSSI e a qualidade da ligação. Defina o formato de vídeo para HD para apresentar os elementos nos sítios certos.
Por fim, é necessário ligar os óculos de proteção e o transmissor de vídeo. Ligar o drone e esperar que o transmissor de vídeo pisque a verde. Em seguida, prima o pequeno botão no transmissor de vídeo e nos óculos de proteção até que ambos estejam ligados.

Finalmente, monte as hélices. Nós utilizamos as hélices Gemfan Hurricane em azul. Coloque as hélices de modo a que fiquem viradas para fora, para evitar atirar sujidade para a câmara. Isto corresponde à direção de rotação do motor previamente determinada. Fixe as hélices com as porcas fornecidas e aperte-as com a ferramenta para hélices.

Agora está pronto para o primeiro voo de teste! Ligue o telecomando, alimente os óculos de proteção e ligue a bateria ao drone. verifique o som do drone durante o voo e certifique-se de que não ouve vibrações invulgares. Vigia a tensão da bateria para não a descarregar demasiado. Se tudo correr bem, construiu com sucesso o seu próprio drone FPV!
Se precisar de mais dicas para o seu primeiro voo, veja o nosso vídeo. Podes encontrar todas as peças e ferramentas na nossa loja. Diverte-te a voar e deixa-nos um like e uma subscrição!