Uus aasta, uus ehitus! Selles artiklis näitame teile, kuidas panna kokku 5-tolline HD FPV-droon filmikaadrite ja freestyle'i jaoks ning mida selleks vaja läheb.
Kõik kasutatavad osad on loomulikult saadaval meie poes ja see aitab meid tohutult, kui te peatusite. Aitäh!
See blogipostitus on saadaval ka videona. Lihtsalt klõpsa ülalpool play'ile või vaata meie YouTube kanalit.
Meie FPV-drooni ehitamiseks vajame mitmeid olulisi komponente. Põhiliste ehitusplokkide hulka kuuluvad raam, mis moodustab drooni struktuuri, ja vastuvõtja, mis võtab vastu juhtimissignaalid. Neli mootorit ajavad propellereid, samas kui videosaatja ja kaamera edastavad otseülekannet FPV-prillidele. Vajalikud on ka lennujuhtimispult, mis on drooni "aju", ja kontroller, mis juhib mootorite toiteallikaid.
Neid komponente on vaja FPV-drooni ehitamiseks:

Videopildi vastuvõtmiseks soovitame Walksnail Avatar Goggles X, mis on üks populaarsemaid HD FPV prille. Kaugjuhtimiseks kasutame Jumper T20 V2. Millist raadiot te täpselt kasutate, ei ole nii oluline. Küll aga peab see toetama ELRS-ülekandeprotokolli. Akuna kasutame Hiina Hobbyline'i 6S LiPo akut, kuna ehitame 6S-ga ühilduvat kopterit.
Seda varustust me kasutasime:
Ehituse jaoks on vaja ka erinevaid tööriistu. Oluline on jootekolb, eelistatavalt korralik jootekolb, samuti jootepulber. Soojuskrõmblustorude kokkutõmbamiseks võib kasutada tulemasinat või soojuspüstolit. Erinevate rakenduste jaoks on praktilised kaablisidemed, suuremate kaablite jaoks kaablitõmburid, väiksemate kaablite jaoks küljelõikurid ja väikesed nõelapitsid. Propellerite paigaldamiseks on vaja propelleritööriistu. Kõige olulisem tööriist on juba praktilises Ethixi tööriistakohvris olemas.
Kasulik tööriist igale FPV-piloodile:
Nüüd, kui me oleme selle ära teinud, on aeg ehitada FPV-droon.
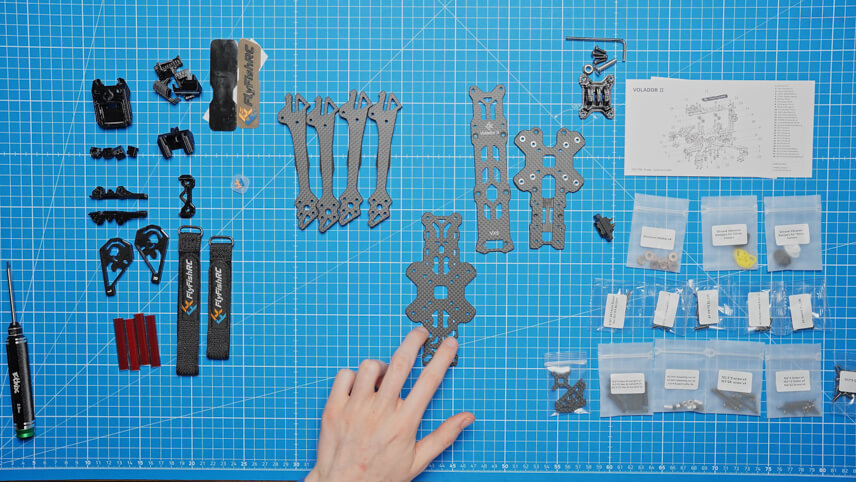
Alustame raami kokkupanemisest. Kõigepealt pakkige kõik osad lahti, et saada hea ülevaade. Asetage raami neli kätt nii, et need moodustaksid keskel risti. Väike plussosa aitab käed keskele kinnitada, mis hõlbustab hiljem nende kokku kruvimist. Vajutage see plussosa kindlalt keskele, nii et käed oleksid tihedalt koos.
Varrede kinnitamiseks vajate M3x12 kruvisid. Pöörake kopter ümber ja veenduge, et FlyFishi logo oleks õigesti paigutatud. Kasutage käte kinnitamiseks alumiiniumist seibid. Kasutage kõigepealt välimisi auke, seejärel pikemaid M3x28 kruvisid sisemiste aukude jaoks. Jätke need kruvid lõdvaks, kuni kõik kruvid on paigaldatud, seejärel pingutage neid.
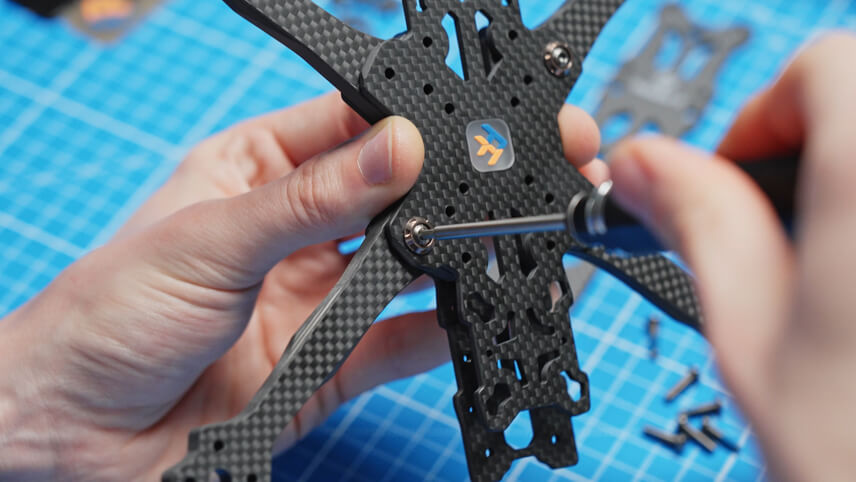
Niipea, kui kõik kruvid on pingul, tulevad mängu esimesed 3D-trükitud TPU-osad. Paigaldage kõigepealt antenni klamber tagaküljele. Kasutage M2x12 kruvisid ja 1,5 mm kuuskantkruvikeerajat, et kruvida klamber altpoolt raami sisse. Jällegi jätke kõik lahti ja pingutage alles lõpus.
Järgmisena paigaldame kaamerakinnituse. See koosneb kahest süsinikplaadist, kahest alumiiniumosast ja väikesest TPU huulikust. Kõigepealt suruge süsiniku plaadid raami sisse. Seejärel kinnitage alumiiniumosad süsinikplaatide külge, kuid keerake need ainult lõdvalt kinni, nii et kaamera mahub veel nende vahele.

Nüüd on aeg standoffide, raamide erinevate tasandite distantside jaoks. Neid on eri suuruses: suured, veidi väiksemad ja väga väikesed GPS-kinnituse jaoks. Kõigepealt kinnitage suured standoffid raami külge ülaltpoolt M3x16 kruvide abil. Kaks paigutatakse raami keskele ja veel kaks taha. Väiksemad standoffid, mille kinnitate M2,5x9 kruvidega, lähevad taha.
Nüüd valmistame ette mootorid. Kasutame iFlight Xing2 2306 mootoreid 1755 KV-ga. Esmalt vajutage TPU varrekaitsmed raami varrede külge, et kaitsta süsinikku ja mootoreid. Seejärel võtame mootori, hoiame seda käe külge ja keerame aeglaselt esimesed kruvid kinni. Jälgige, et mootor istuks sirgelt käe küljes, et niit ei saaks kahjustada. Samuti tuleb jälgida, et kruvid ei puutuks mootori mähistega kokku. Korrake seda sammu kõigi nelja mootori puhul.

Nüüd on kord lennujuhtimisseadme ja ESC-i kord. Võtke kõigepealt kõik pakendist välja: XT60 pistik, kruvid, varukaablid ja silikoonist summutid. Kontroller, mida tuntakse ka ESC nime all, on kiip, millega on ühendatud kõik mootorid. Lennukontroller on drooni "aju", millega hiljem kõik komponendid ühendatakse.
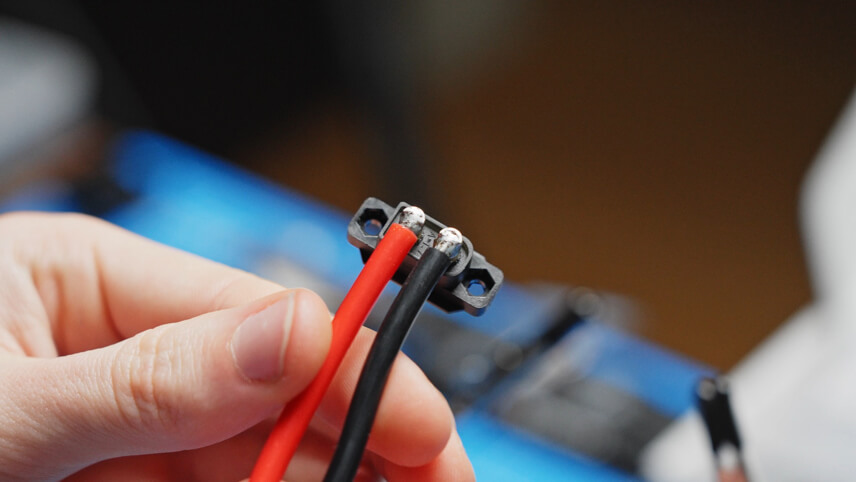
XT60 pistiku kaablite ühendamiseks 90° nurga all, jootame kõigepealt pistiku kontaktid ette. Muide, me kasutame XT60 pistikut, mis tuli koos raamiga.
Kaablid on samuti eelkonserveeritud. Seejärel jootame kaablid XT60 pistiku kontaktide külge. Veenduge, et kahe kontakti vahel ei puutu midagi kokku.
Kondensaator asetatakse raami altpoolt, kusjuures pluss jootetakse plussile ja miinus miinusele. Me pidime hankima väiksema kondensaatori (suuruse poolest), kuna ESC-st pärit kondensaator ei mahu raami sisse.
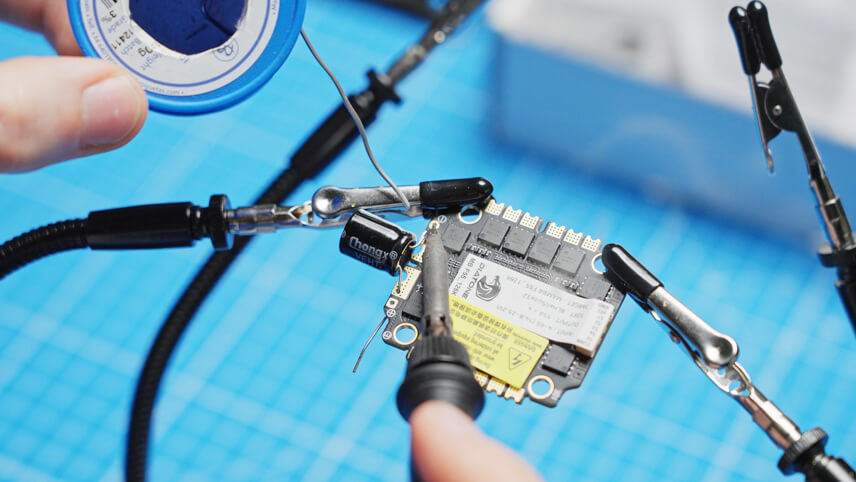
Lõika kondensaatori väljaulatuvad jalad ära. Seejärel valmistage ette ESC-i toitekaablite jootekohad ja jootke ka toitekaablid.
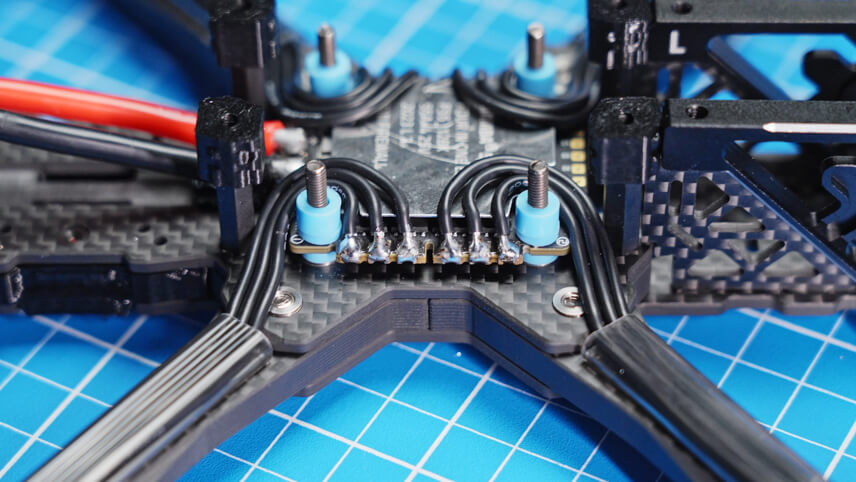
Nüüd paigaldame ESC raami. Selleks tõmmake silikoonist summutid läbi raami aukude. Kolm ühendust mootori kohta on eelnevalt jootetud. Seejärel kinnitage mootori kaablikaitsmed ja suruge kaablid läbi nende kaitsmete, enne kui jootate need ESC-le. Oluline on, et kaablid ei puutuksid üksteist ja oleksid ühendatud ainult vastava jootekohaga.
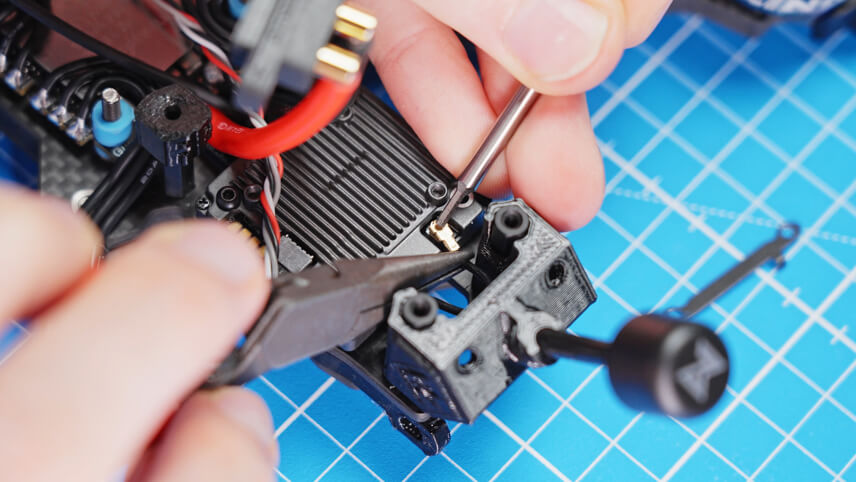
Järgmisena on tulemas videosaatja süsteem. Me kasutame Walksnail Avatar HD Kit V2, mis koosneb antennist, videosaatjast ja kaamerast. Videosaatja paigaldatakse raami tagaküljele ja kaamera ettepoole. Kaablid on paigaldatud nii, et videosaatja saaks õigesti paigutada. Kasutage kaasasolevate kruvide ja seibidega videosaatja kruvimiseks.
Eemaldage videosaatja katteplaat, et teha nähtavaks U.FL ühendus. Kinnitage antenn klambri külge ja ühendage antenn videosaatja külge. Paigaldage plaat tagasi ja keerake kruvid kinni.
Videosaatja ühendamiseks lennujuhtimispuldiga joota punane kaabel 9V alusele, must kaabel GND alusele, hall TX-kaabel RX3 alusele ja valge RX-kaabel lennujuhtimispuldi TX3 alusele. Veenduge, et RX ja TX oleksid korrektselt ühendatud, et tagada sujuv side. Täpse skeemi leiate FC ja video saatja juhistest.
Videosaatja on nüüd täielikult paigaldatud ja XT60 pistiku võib suruda tagaküljel asuvatele stendoffidele.
Sisestage silikoonist summutid lennujuhtimispuldi küljele ja ühendage juhtimispuldi kaabel lennujuhtimispuldiga. Paigaldage lennujuhtimispult raami ja kinnitage see kaasasolevate mutritega.
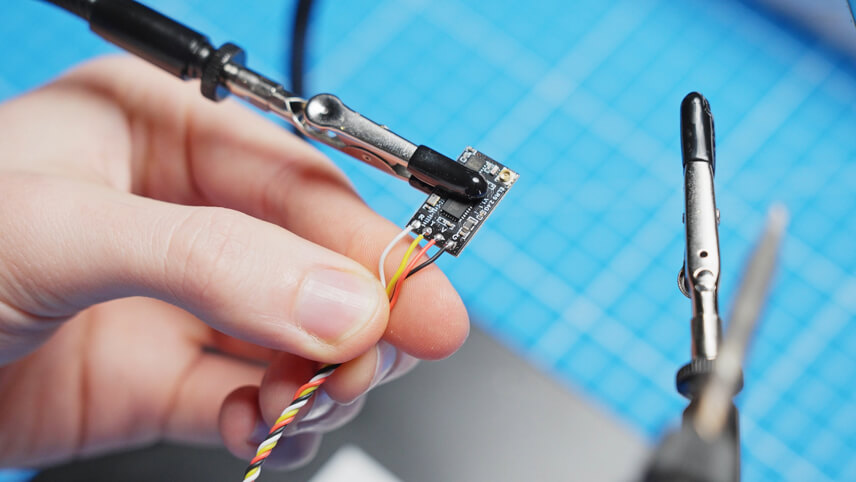
Nüüd on vastuvõtja paigaldatud. Kasutame ELRS-vastuvõtjat, mis ühendatakse sarnaselt videosaatjaga. Ühenduste õige määramise leidmiseks vaadake juhendit. Tavaliselt on ühendused GND (must), 5V (punane), TX (hall) ja RX (valge). Need kaablid on jootetud lennujuhtimisseadme UART1 ühendusele: TX - RX, RX - TX, 5V - 5V ja GND - GND. Kitsendustorud kaitsevad nii plaati kui ka kaableid. Paigaldage vastuvõtja kaamera taha, tõmmates antenni kaamera alla ja kinnitades kõik kaablisidemetega. Alternatiivselt võite kasutada kahepoolset kleeplappi.
Järgmine samm on ülemise plaadi paigaldamine. Selleks kasutatakse erinevaid kruvisid: M2,5 kruvid taga, süvistatud kruvid keskel ja laiema peaga kruvid GoPro kinnituse jaoks ees. Need spetsiaalsed kruvid takistavad TPU välja rebimist kukkumise korral. Pingutage kõiki kruvisid, kuid ärge liialdage, et vältida kahjustusi. Paigaldage ka akupadi, joondades selle õigesti ja vajutades seda alla, et vältida aku libisemist.
Enne, kui liigume edasi tarkvara seadistamise juurde, testime elektroonikat. Ühendage aku ja drooni vahele suitsuklapp, et tuvastada mis tahes valesid ühendusi, ilma et komponente kahjustataks. Kui kõik vastuvõtja, lennujuhtimispuldi ja videosaatja LED-id põlevad, olete valmis konfigureerimiseks.

Kopteri seadistamiseks vajate arvutis kahte programmi: ExpressLRS konfiguraator vastuvõtja jaoks ja Betaflight konfiguraator lennujuhtimispuldi jaoks.
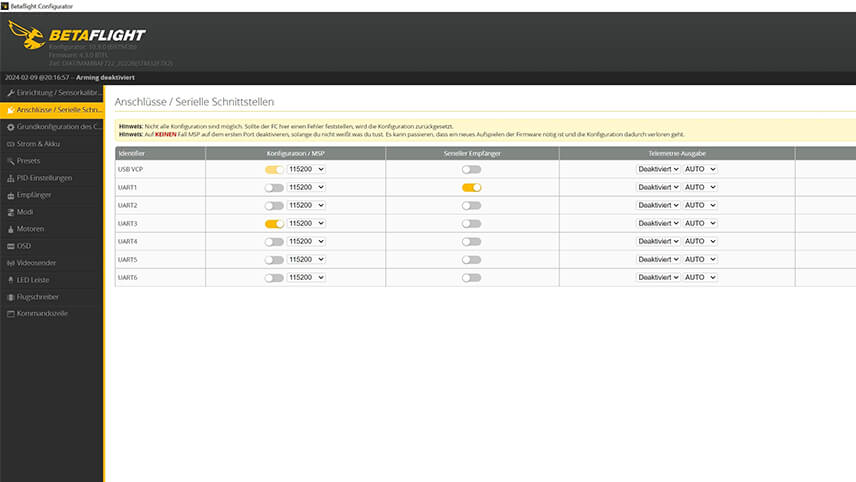
Alustage Betaflightiga. Ühendage lennujuhtimispuldiga ja veenduge, et vastuvõtja on seatud UART1-le ja videosaatja UART3-le. Aktiveerige vastavad ühendused ja salvestage konfiguratsioon.
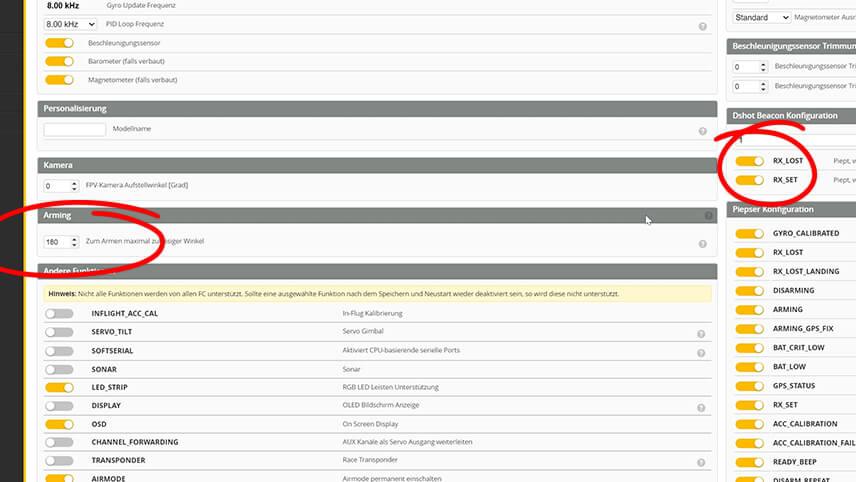
Seadke põhikonfiguratsioonis relvastusnurgaks 180°, et droon saaks startida igas suunas. Aktiveerige RX_LOST ja RX_SET, et mootorid piiksuksid ühenduse kadumisel. Salvestage seaded. Valige jaotises "Receiver" (vastuvõtja) CRSF, ELRS-vastuvõtja protokoll.
Vahetage ExpressLRSi konfiguraatorisse. Valige õige versioon ja sobiv vastuvõtja. Ühendage ja installige püsivara. See võib võtta paar minutit. Kui paigaldus õnnestus, võite tagasi lülituda Betaflight'ile ja testida ühendust. Liigutage puldi vardaid kaugjuhtimispuldil ja kontrollige, kas kõrvalekalded on Betaflightis nähtavad.
Vahetage Betaflightis lennurežiimid ja lisage Pre-Arm, Arm ja Angle režiimid. Määrake vastavad lülitid oma kaugjuhtimispuldil, klõpsates "Add Range" ja liigutades lüliteid. Veenduge, et vahemikud on õigesti määratud, nii et režiimid oleksid aktiivsed ainult siis, kui lülitid on ümber keeratud. Salvestage seaded ja testige, kas lülitid kuvatakse Betaflightis korrektselt, kui te neid puldil liigutate.
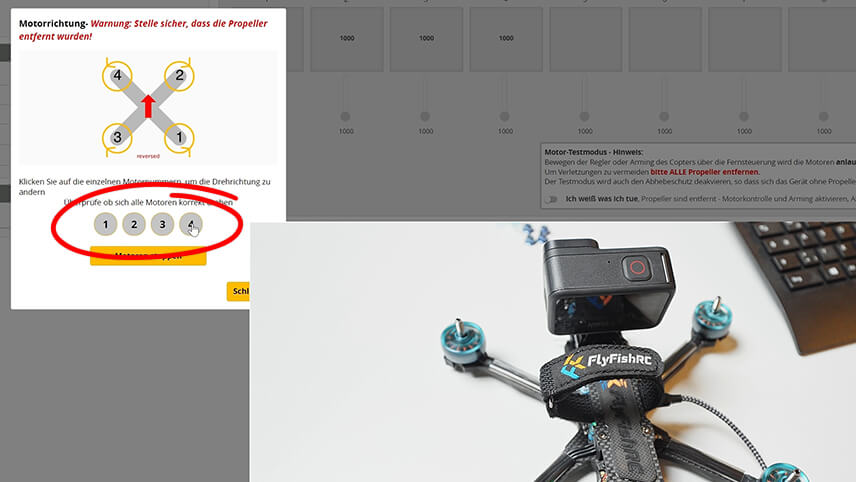
Kontrollige Betaflight'i vahekaardil "Motors" mootorite pöörlemissuunda. Veenduge, et propellerid on eemaldatud ja aktiveerige lüliti, mis võimaldab mootorite juhtimist. Ühendage aku ja märkige ruut "Reverse motors". Sest me tahame, et propsid pöörlemissuunda välja pöörlevad. Kontrollige mootorite pöörlemissuunda ja klõpsake vastava mootori numbril, et muuta pöörlemissuunda, kui see ei ole õige. Salvestage seaded ja veenduge, et kõik mootorid pöörlevad nii nagu ette nähtud.
Seadistage OSD-s (On-Screen Display) elemendid, mida soovitakse kuvada prillide ekraanil. Aktiveerige keskmine rakupinge, lennurežiim, taimer 1 ja 2, samuti RSSI väärtus ja ühenduse kvaliteet. Seadistage videoformaadiks HD, et kuvada elemente õigetes kohtades.
Lõpuks tuleb ühendada prillid ja videosaatja. Lülitage droon sisse ja oodake, kuni videosaatja vilgub roheliselt. Seejärel vajutage videosaatjal ja prillil väikest nuppu, kuni mõlemad on ühendatud.

Lõpuks paigaldage propellerid. Me kasutame sinist värvi Gemfan Hurricane propellereid. Asetage propellerid nii, et need pöörlevad väljapoole, et vältida mustuse paiskumist kaamerasse. See vastab eelnevalt kindlaks määratud mootori pöörlemissuunale. Kinnitage propellerid kaasasolevate mutritega ja pingutage neid propelleritööriistaga.

Nüüd olete valmis esimeseks katselennuks! Lülitage kaugjuhtimispult sisse, varustage prillid vooluga ja ühendage aku drooni külge. kontrollige drooni heli lennu ajal ja veenduge, et te ei kuule ebatavalisi vibratsioone. Hoidke silma peal aku pingel, et aku ei tühjeneks liiga sügavalt. Kui kõik läheb hästi, olete edukalt oma FPV-drooni ehitanud!
Kui vajate veel nõuandeid oma esimeseks lennuks, vaadake meie videot. Kõik osad ja tööriistad leiad meie poest. Lõbusat lendamist ja palun jäta meile like ja tellimus!