
FPV (first-person view) hobi pakub drooni- ja RC-pilootidele põnevat võimalust juhtida oma õhusõidukit nii, nagu istuksid nad ise piloodikabiinis. Videotehnoloogial on selles keskne roll: seadmele paigaldatud kaamera edastab piloodile pilti reaalajas, võimaldades tal juhtida õhusõidukit esimese isiku vaatenurgast. See kaasahaarav kogemus teeb FPV-lennu nii atraktiivseks ja nõuab täpse kontrolli säilitamiseks usaldusväärset ja stabiilset videosignaali.
Tänapäeva FPV-süsteemides on digitaalsed videosüsteemid varjutanud varem laialdaselt kasutatud analoogsüsteemid. Digitaalsed FPV-süsteemid pakuvad selgeid eeliseid, eelkõige oluliselt parema pildikvaliteedi ja stabiilse, häirekindla ülekande osas. Tuntud digitaalsed süsteemid, näiteks DJI või Walksnaili omad, pakuvad teravat 720p või isegi 1080p pilti ja võimaldavad väga stabiilset ühendust pikkade vahemaade tagant. Need digitaalsüsteemid ei ole end tõestanud mitte ainult vabakasutuses, vaid ka kauglendude puhul, kus usaldusväärne ülekanne on ülioluline.
Sellest hoolimata on alati olemas uuenduslikud lähenemisviisid, et arendada edasi videoülekande tehnoloogiat FPV-hobis. Üks neist põnevatest arengutest on OpenIPC. OpenIPC on avatud lähtekoodiga püsivara, mis on algselt välja töötatud IP-kaamerate jaoks ja mida nüüd hakatakse rakendama ka FPV-süsteemile. Kuigi see on veel arendamisel ja ei saavuta praegu sama taset kui kaubanduslikud süsteemid, pakub see huvitavat võimalust muuta hobi veelgi avatumaks.
IP-põhised kaamerad pakuvad teoreetiliselt suurt paindlikkust: nad võimaldavad kohandamist ja individuaalseid konfiguratsioone, mis on sageli kaubanduslikel süsteemidel võimatu. Lisaks võib OpenIPC olla tulevikus kulutasuv alternatiiv, mida kogukond pidevalt täiendab. see on sarnane ExpressLRS (ELRS) juhtimisprotokolliga. Siiski ei ole see tehnoloogia veel piisavalt küps, et saada FPV-kogemusest kõige rohkem kasu. Eriti sellistes valdkondades nagu latentsus ja stabiilsus tuleb veel edusamme teha, et pidada sammu väljakujunenud süsteemidega.
Sellest hoolimata näitab OpenIPC, kuidas avatud lähtekoodiga projektid võivad mõjutada FPV-turgu ja luua pilootidele alternatiivseid võimalusi oma süsteemide kohandamiseks ja individualiseerimiseks.
Kuigi OpenIPC on veel avatud lähtekoodiga püsivara arendamisel, on juba olemas mõned huvitavad FPV-tooted, mida saab kasutada koos selle tarkvaraga. Eriti kaks toodet on FPV-kogukonnas tekitanud elevust: EMAX Wyvern Link ja RunCam WiFiLink. Mõlemad süsteemid põhinevad OpenIPC-l, mis muudab need põnevaks valikuks FPV-pilootidele, kes soovivad eksperimenteerida.
Märkus: Praegu on allpool esitatud süsteemidest olemas ainult alfa-versioonid. Ei tasu oodata kvaliteetset ja veatut toodet. Tootjad toovad need süsteemid turule, et anda rohkematele inimestele võimalus OpenIPC-süsteeme edasi arendada. Ja mitte selleks, et müüa täiuslikku toodet.
EMAX Wyvern Link on OpenIPC-ga ühilduv digitaalne videosaatja (VTX) ja -vastuvõtja (VRX), mis on mõeldud FPV-pilootidele, kes otsivad taskukohast alternatiivi patenteeritud digitaalsetele FPV-süsteemidele. Vastuvõtja pakub tugevaimas versioonis kuni 2W maksimaalset ülekandevõimsust, mis koos tugevaima saatjaga (800mW) peaks võimaldama märkimisväärset ulatust ja stabiilsust videosignaalis. Ja jah, vastuvõtja edastab ka digitaalsüsteemidega ja vastupidi. Seetõttu, nagu Joshua Bardwell juba ütles, eelistame me nimetada vastuvõtjat Groundunit ja saatjat Airunit.
Seni on EMAX ka ainus tootja FPV-sektoris, kes pakub nelja erinevat OpenIPC-toodet. Lisaks eespool kirjeldatud suure jõudlusega komponentidele on nende hulgas ka odavamaid tooteid, mida kasutatakse pigem väiksemate kopterite puhul, mis vajavad ülekandmiseks vähem energiat.
Pildikvaliteet on praegu piiratud 720p (120fps) kiirusega umbes 4 Mbps, mis on märgatavalt madalam võrreldes DJI või Walksnaili kõrge resolutsiooniga süsteemidega (25-50 Mbps). See toob kaasa blokeerumise kiirelt liikuvates stseenides ja vähendab pildi teravust kiirete manöövrite ajal.

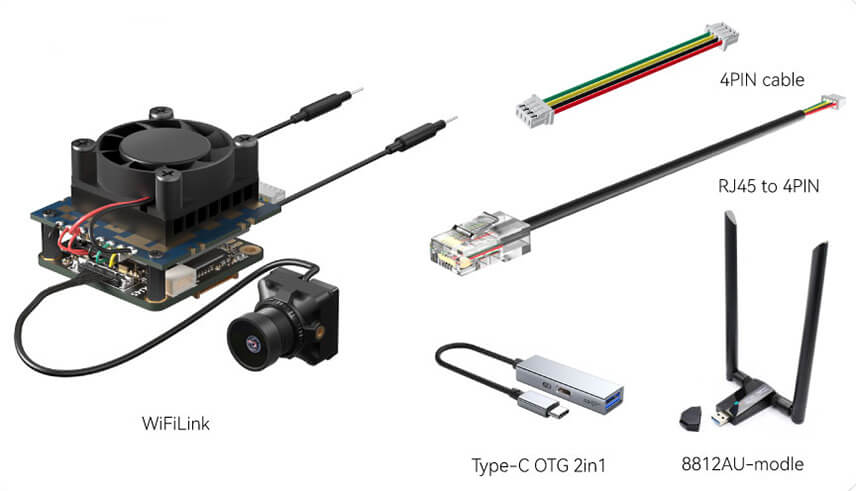
RunCam WiFiLink on veel üks OpenIPC-ga ühilduv toode, mis tugineb WiFi-põhisele videostriimimise tehnoloogiale. Ülekandetehnoloogia poolest on see väga sarnane EMAXi süsteemiga, kuid pakub ka Full HD-ülekande võimalust. Kaadrisagedus on siis aga vähendatud 60 kaadri sekundile.
Nagu EMAXi puhul, ei sobi see süsteem veel professionaalseteks rakendusteks, sest WiFi-põhised lahendused on vastuvõtlikumad latentsusprobleemide ja signaali väljalangemise suhtes kui traditsioonilised 5,8 GHz traadita ühendused.
RunCam WiFiLinki puhul näeb ka maapealne jaam EMAXist veidi erinev välja. Vastuvõtmine toimub "klassikalise" WiFi-mooduli kaudu, mis ühendatakse USB OTG kaudu nutitelefoniga ja mängib vastuvõetud pilti tagasi.
Üldiselt pakub OpenIPC vastuvõetavat latentsust, mis on umbes 25 ms, mis on DJI FPV V1 lähedane. Pilootidele, kes soovivad katsetada rohkem tehnoloogia kaugemale, pakuvad EMAX ja RunCam selliseid paljulubavaid platvorme, kuid need ei tööta praegu sama stabiilselt kui väljakujunenud süsteemid.
OpenIPC arendamisel aitamiseks on mitmeid võimalusi, kuidas kogukond saab osaleda:
Kasutajad saavad OpenIPCi paigaldada ühilduvatesse seadmetesse ja seda põhjalikult testida. Firmware optimeerimiseks on oluline anda tagasisidet vigade, jõudluse kõikumise või võimalike paranduste kohta. Sellist tagasisidet saab jagada otse sellistel platvormidel nagu GitHub või spetsiaalsetel FPV-foorumitel.
Igaüks, kellel on programmeerimiskogemus (eriti C, C++ või Python), saab aktiivselt kaasa aidata koodi täiustamisele. OpenIPC on avatud lähtekoodiga projekt, mis on avalikult kättesaadav GitHubis. Arendajad saavad lisada uusi funktsioone, parandada olemasolevaid vigu ja parandada dokumentatsiooni.
Rahaline toetus aitab OpenIPC meeskonnal arendada edasi, teha riistvara teste ja katta serveri kulusid.
Osalemine foorumites, sotsiaalvõrgustikes ja Discordi rühmades aitab levitada teadmisi ja toetada teisi kasutajaid paigaldamise ja kasutamise ajal. Selline kogukonna hooldamine on oluline kasvava kasutajaskonna loomiseks.
Kokkuvõttes oleme põnevil, et näha, kuhu OpenIPC-süsteemide teekond FPV-maailmas meid viib. Millised tooted tulevad, millised tootjad hüppavad sellele rongile ja kui konkurentsivõimelised on OpenIPC tooted võrreldes selliste väljakujunenud süsteemidega nagu DJI või Walksnail. Võib-olla on tooted peagi saadaval meie poes.
Allikad: OpenIPC, Oscar Liang, Joshua Bardwell, RunCam, EMAX











