Нова година, ново строителство! В тази статия ще ви покажем как да сглобите 5-инчов HD FPV дрон за кинематографични кадри и свободен стил и какво ви е необходимо за него.
Всички използвани части, разбира се, са налични в нашия магазин и ще ни помогне изключително много, ако се отбиете при нас. Благодарим ви!
Тази публикация в блога е достъпна и като видеоклип. Просто кликнете върху Play по-горе или разгледайте нашия канал в YouTube.
Необходими са ни няколко важни компонента, за да създадем нашия FPV дрон. Основните градивни елементи включват рамката, която формира структурата на дрона, и приемника, който получава сигналите за управление. Четири двигателя задвижват витлата, а видеопредавателят и камерата предават живото изображение към FPV очилата. Необходими са също полетният контролер, "мозъкът" на дрона, и контролерът, който управлява захранването на двигателите.
Нуждаете се от тези компоненти, за да построите FPV дрон:

За получаване на видеоизображението препоръчваме очилата Walksnail Avatar Goggles X, едни от най-популярните HD FPV очила. За дистанционното управление използваме Jumper T20 V2. Кое точно радиочестотно устройство ще използвате, не е толкова важно. То обаче трябва да поддържа протокола за предаване ELRS. Използваната батерия е 6S LiPo батерия от китайската компания Hobbyline, тъй като изграждаме коптер, съвместим с 6S.
Това е оборудването, което използвахме:
За конструирането ще ви трябват и няколко инструмента. От съществено значение е поялник, за предпочитане подходяща станция за запояване, както и спойка. За свиване на термосвиваемите тръбички може да се използва запалка или топлинен пистолет. Кабелните превръзки са практични за различни приложения, както и клещите за отстраняване на проводници за по-големи кабели, страничните резачки и малките клещи с иглички за по-малки кабели. Ще ви е необходим инструмент за монтиране на витлата. Най-важният инструмент вече е включен в практичния куфар с инструменти на Ethix.
Полезен инструмент за всеки FPV пилот:
Сега, след като приключихме с това, е време да построим FPV дрона.
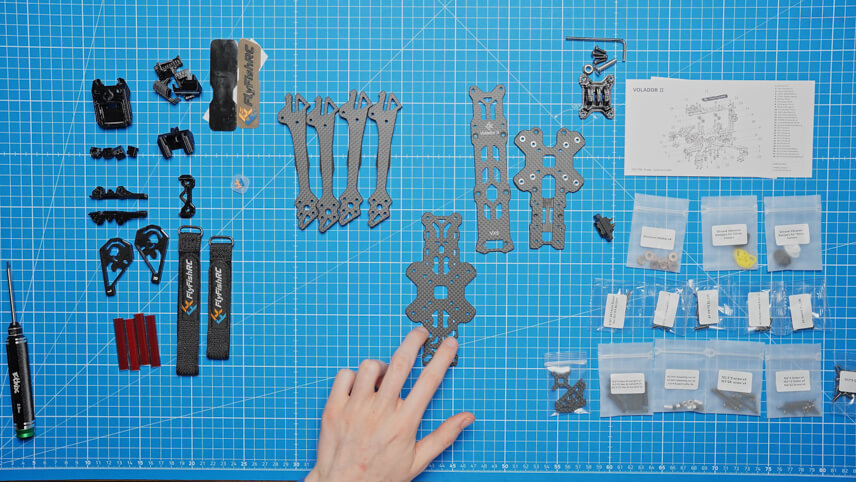
Нека започнем със сглобяването на рамката. Първо, разопаковайте всички части, за да получите добър преглед. Разположете четирите рамена на рамката, така че да образуват кръст в центъра. Малка плюшена част помага за фиксиране на рамената в центъра, за да се улесни завинтването им по-късно. Натиснете този плюс-код здраво в центъра, така че рамената да са близо едно до друго.
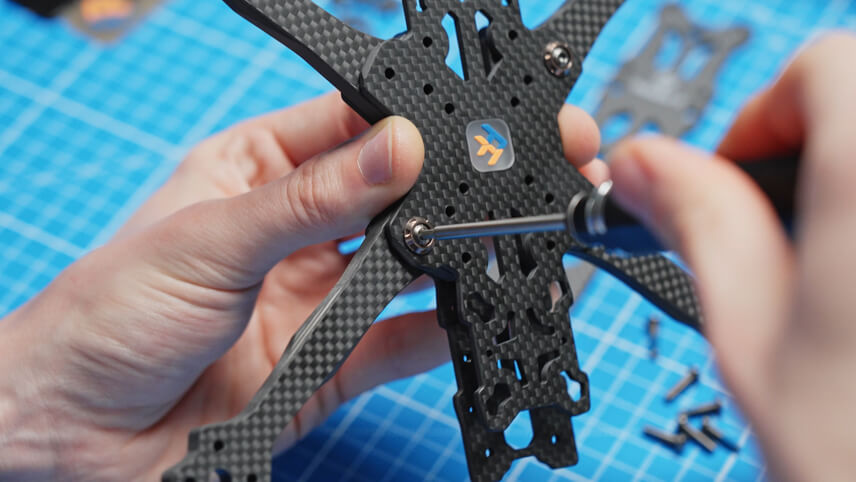
За закрепването на рамената ще са ви необходими винтове M3x12. Обърнете хеликоптера и се уверете, че логото FlyFish е разположено правилно. Използвайте алуминиеви шайби, за да закрепите рамената. Първо използвайте външните отвори, а след това по-дългите винтове M3x28 за вътрешните отвори. Оставете тези винтове разхлабени, докато всички винтове бъдат монтирани, след което ги затегнете.
Веднага след като всички винтове са затегнати, се появяват първите 3D-отпечатани части от TPU. Първо, монтирайте скоба за антена в задната част. Използвайте винтове M2x12 и шестостенна отвертка с диаметър 1,5 мм, за да завиете скобата в рамката отдолу. Отново оставете всичко хлабаво и затегнете едва накрая.
След това монтираме стойката на камерата. Тя се състои от две карбонови пластини, две алуминиеви части и малък ръб от TPU. Първо натиснете карбоновите пластини в рамката. След това прикрепете алуминиевите части към карбоновите пластини, но ги завийте само свободно, така че камерата все още да се вмества между тях.

Сега е време за стойките, дистанционните елементи за различните нива на рамката. Има различни размери: големи, малко по-малки и много малки за монтиране на GPS. Първо, прикрепете големите стойки към рамката отгоре с помощта на винтове M3x16. Две от тях се поставят в центъра на рамката, а други две - отзад. По-малките стойки, които се закрепват с винтове М2,5x9, се поставят отзад.
Сега подготвяме двигателите. Използваме двигатели iFlight Xing2 2306 с мощност 1755 KV. Първо притиснете TPU протекторите на раменете върху раменете на рамката, за да предпазите карбона и двигателите. След това вземете един двигател, придърпайте го към рамото и бавно затегнете първите винтове. Уверете се, че двигателят стои изправен върху рамото, за да не се повреди резбата. Също така трябва да се уверите, че винтовете не докосват намотките на двигателя. Повторете тази стъпка за всичките четири двигателя.

Сега е ред на полетния контролер и ESC. Първо извадете всичко от опаковката: конектора XT60, винтовете, резервните кабели и силиконовите амортисьори. Контролерът, известен също като ESC, е чипът, към който са свързани всички двигатели. Полетният контролер е "мозъкът" на дрона, към който по-късно се свързват всички компоненти.
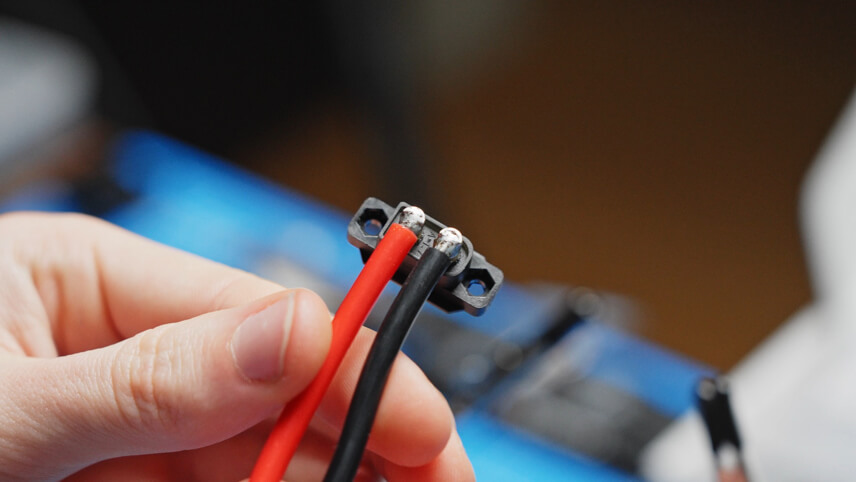
За да свържем кабелите на конектора XT60 под ъгъл 90°, първо трябва предварително да запояваме контактите на конектора. Между другото, използваме конектора XT60, който е доставен с рамката.
Кабелите също са предварително запоени. След това запоявайте кабелите към контактите на конектора XT60. Уверете се, че нищо не се допира между двата контакта.
Кондензаторът се поставя в рамката отдолу, като плюсът се запоява към плюса, а минусът - към минуса. Трябваше да вземем по-малък кондензатор (по отношение на размера), тъй като този от ESC не се побира в рамката.
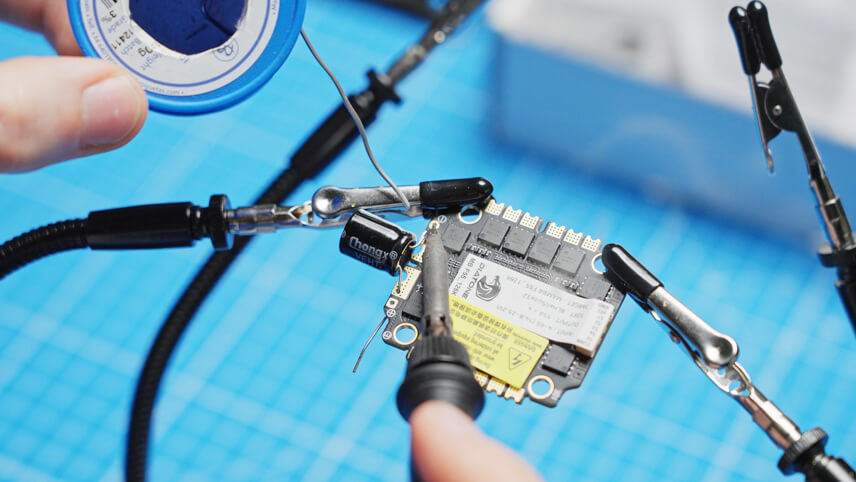
Отрежете стърчащите крачета на кондензатора. След това можете да подготвите точките за запояване на захранващите кабели на ESC и да запоите и захранващите кабели.
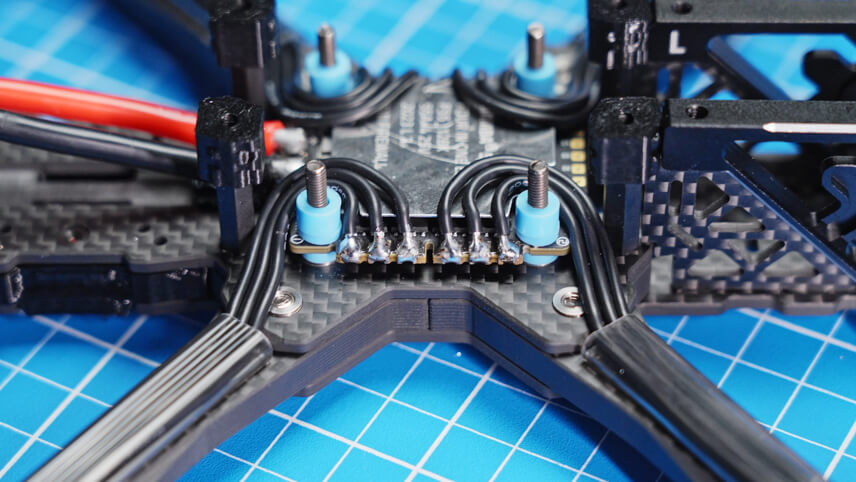
Сега монтираме ESC в рамката. За целта издърпайте силиконовите амортисьори през отворите в рамката. Трите връзки за всеки двигател са предварително запоени. След това прикрепете кабелните защити на двигателите и прокарайте кабелите през тези защити, преди да ги запоите към ESC. Важно е кабелите да не се допират един до друг и да са свързани само към съответната подложка за запояване.
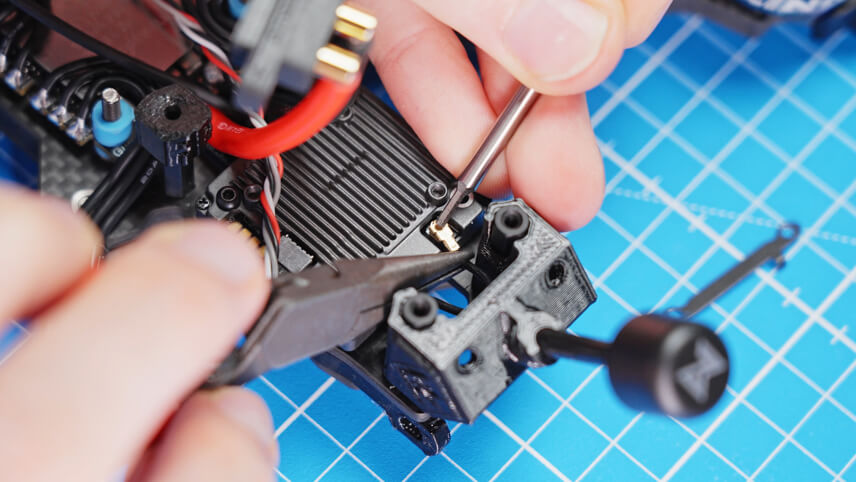
Следващата стъпка е системата на видеопредавателя. Ние използваме комплекта Walksnail Avatar HD Kit V2, състоящ се от антена, видеопредавател и камера. Видеопредавателят е монтиран в задната част на рамката, а камерата - в предната. Кабелите се полагат така, че видеопредавателят да може да се позиционира правилно. Използвайте доставените винтове и шайби, за да завиете видеопредавателя на мястото му.
Свалете капака на видеопредавателя, за да откриете U.FL връзката. Закрепете антената към скобата и свържете антената към видеопредавателя. Поставете отново пластината и затегнете винтовете.
За да свържете видеопредавателя към полетния контролер, запоете червения кабел към подложката 9V, черния кабел към подложката GND, сивия кабел TX към подложката RX3 и белия кабел RX към подложката TX3 на полетния контролер. Уверете се, че RX и TX са свързани правилно, за да осигурите безпроблемна комуникация. Точната схема може да бъде намерена в инструкциите за FC и видеопредавателя.
Видеопредавателят вече е напълно инсталиран и конекторът XT60 може да бъде натиснат върху стойките отзад.
Поставете силиконовите амортисьори отстрани на полетния контролер и свържете кабела на контролера към полетния контролер. Монтирайте полетния контролер в рамката и го закрепете с предоставените гайки.
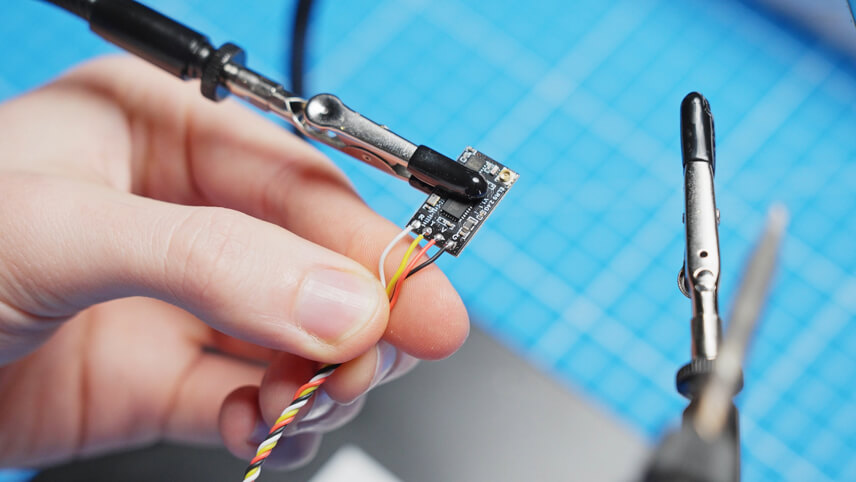
Сега приемникът е монтиран. Ние използваме приемник ELRS, който се свързва по подобен начин на видеопредавателя. Направете справка с инструкциите, за да намерите правилното разпределение на връзките. Обикновено връзките са GND (черно), 5V (червено), TX (сиво) и RX (бяло). Тези кабели се запояват към връзката UART1 на полетния контролер: TX към RX, RX към TX, 5V към 5V и GND към GND. Термосвиваемата тръба предпазва както платката, така и кабелите. Монтирайте приемника зад камерата, като издърпате антената под камерата и закрепите всичко с кабелни превръзки. Като алтернатива можете да използвате двустранно залепваща лента.
Следващата стъпка е да монтирате горната плоча. За тази цел се използват различни винтове: винтове M2,5 отзад, винтове с потапяне в центъра и винтове с по-широка глава за монтиране на GoPro отпред. Тези специални винтове предотвратяват разкъсването на TPU в случай на падане. Затегнете всички винтове, но не прекалявайте, за да избегнете повреда. Монтирайте и подложката за батерията, като я подравните правилно и я натиснете надолу, за да предотвратите изплъзване на батерията.
Преди да преминем към конфигурирането на софтуера, нека тестваме електрониката. Свържете димна запушалка между батерията и дрона, за да откриете евентуални неправилни връзки, без да повредите компонентите. Когато всички светодиоди на приемника, полетния контролер и видеопредавателя светнат, сте готови за конфигуриране.

За да конфигурирате коптера, ще ви трябват две програми на вашия компютър: конфигураторът ExpressLRS за приемника и конфигураторът Betaflight за полетния контролер.
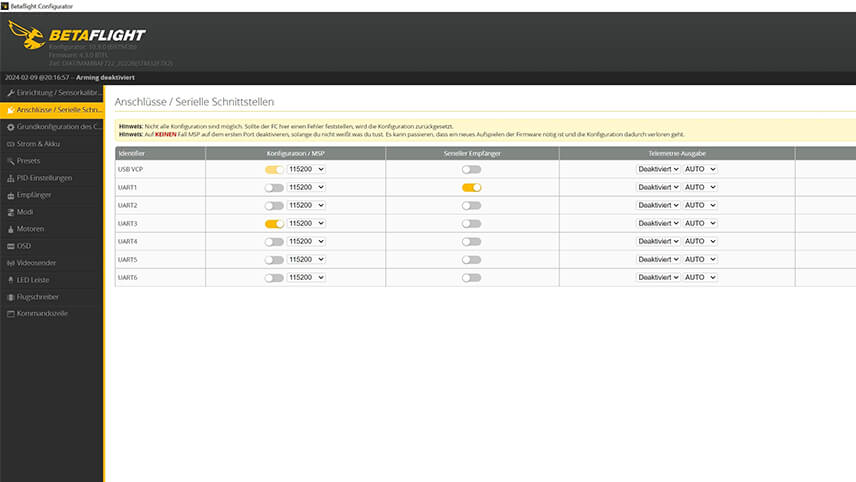
Започнете с Betaflight. Свържете се с полетния контролер и се уверете, че приемникът е настроен на UART1, а видеопредавателят - на UART3. Активирайте съответните връзки и запазете конфигурацията.
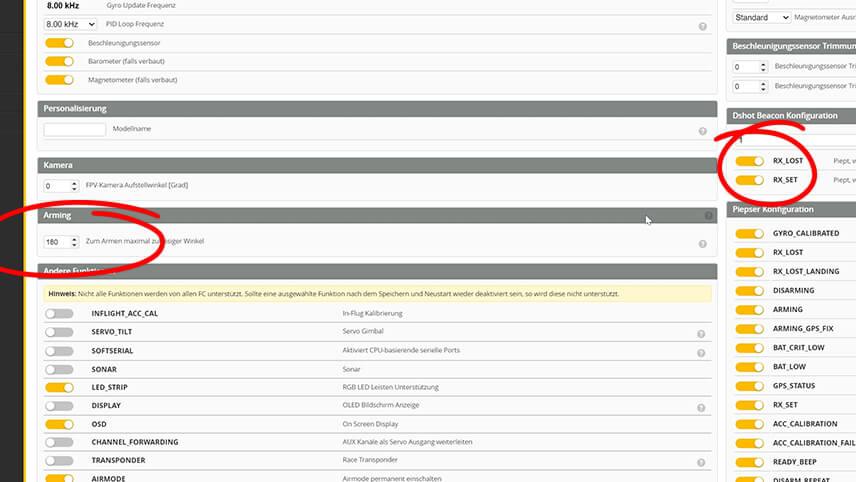
В основната конфигурация задайте ъгъла на въоръжаване на 180°, така че дронът да може да излита във всяка посока. Активирайте RX_LOST и RX_SET, така че двигателите да издават звукови сигнали при загуба на връзка. Запазете настройките. В "Receiver" (Приемник) изберете CRSF, протокола на приемника ELRS.
Превключете към конфигуратора ExpressLRS. Изберете правилната версия и подходящия приемник. Свържете и инсталирайте фърмуера. Това може да отнеме няколко минути. Ако инсталацията е била успешна, можете да превключите обратно към Betaflight и да тествате връзката. Преместете пръчките на дистанционното управление и проверете дали отклоненията се виждат в Betaflight.
Превключете към режимите на полет в Betaflight и добавете режимите Pre-Arm, Arm и Angle. Присвоете съответните превключватели на дистанционното управление, като щракнете върху "Add Range" (Добавяне на обхват) и преместите превключвателите. Уверете се, че диапазоните са зададени правилно, така че режимите да са активни само когато превключвателите са преместени. Запазете настройките и проверете дали превключвателите се показват правилно в Betaflight, когато ги преместите на дистанционното управление.
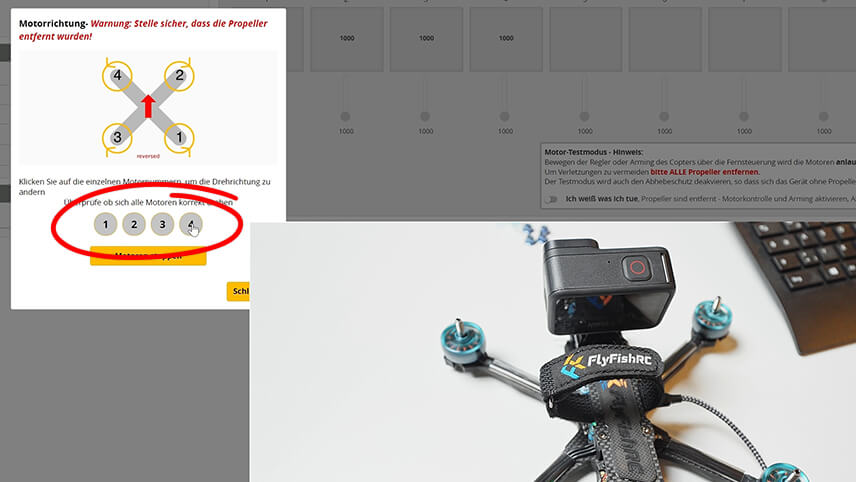
В раздела "Двигатели" на Betaflight проверете посоката на въртене на двигателите. Уверете се, че витлата са свалени и активирайте превключвателя, който активира управлението на двигателите. Свържете батерията и поставете отметка в квадратчето "Реверсивни двигатели". Защото искаме да изведем витлата в посока на въртене. Проверете посоката на въртене на двигателите и щракнете върху номера на съответния двигател, за да промените посоката на въртене, ако тя не е правилна. Запазете настройките и се уверете, че всички двигатели се въртят по предназначение.
В OSD (On-Screen Display - екранен дисплей) задайте елементите, които трябва да се показват в очилата. Активирайте средното напрежение на клетката, режима на полет, таймер 1 и 2, както и стойността на RSSI и качеството на връзката. Задайте формата на видеото на HD, за да се показват елементите на правилните места.
Накрая трябва да се свържат очилата и видеопредавателят. Включете дрона и изчакайте, докато видеопредавателят започне да мига в зелено. След това натиснете малкия бутон на видеопредавателя и на очилата, докато и двете бъдат свързани.

Накрая монтирайте витлата. Ние използваме витла Gemfan Hurricane в син цвят. Разположете витлата така, че да се въртят навън, за да не хвърлят мръсотия в камерата. Това съответства на предварително определената посока на въртене на двигателя. Закрепете витлата с приложените гайки и ги затегнете с инструмента за витла.

Сега сте готови за първия изпитателен полет! Включете дистанционното управление, подайте захранване на очилата и свържете батерията към дрона. проверете звука на дрона по време на полет и се уверете, че не чувате необичайни вибрации. Следете напрежението на батерията, за да не я разреждате прекалено дълбоко. Ако всичко е наред, успешно сте построили свой собствен FPV дрон!
Ако имате нужда от още съвети за първия си полет, разгледайте нашето видео. Всички части и инструменти можете да намерите в нашия магазин. Забавлявайте се с летенето и моля, оставете ни харесване и абонамент!