
De FPV (first-person view) hobby biedt drone- en RC-piloten de fascinerende mogelijkheid om hun vliegtuig te besturen alsof ze zelf in de cockpit zitten. Videotechnologie speelt hierbij een centrale rol: een op het toestel gemonteerde camera stuurt het beeld in realtime door naar de piloot, waardoor deze het vliegtuig vanuit een first-person perspectief kan besturen. Deze meeslepende ervaring is wat FPV vliegen zo aantrekkelijk maakt en vereist een betrouwbaar, stabiel videosignaal om precieze controle te behouden.
In de FPV wereld van vandaag hebben digitale videosystemen de analoge systemen die vroeger veel gebruikt werden ver achter zich gelaten. Digitale FPV-systemen bieden duidelijke voordelen, met name op het gebied van een aanzienlijk hogere beeldkwaliteit en een stabiele, storingsbestendige transmissie. Bekende digitale systemen, zoals die van DJI of Walksnail, leveren haarscherpe 720p of zelfs 1080p beelden en maken een zeer stabiele verbinding over lange afstanden mogelijk. Deze digitale systemen hebben zich niet alleen bewezen in de freestyle sector, maar ook voor langeafstandsvluchten, waarbij betrouwbare transmissie cruciaal is.
Toch zijn er altijd innovatieve benaderingen om de technologie voor videotransmissie in de FPV-hobby verder te ontwikkelen. Een van deze opwindende ontwikkelingen is OpenIPC. OpenIPC is een open source firmware die oorspronkelijk werd ontwikkeld voor IP-camera's en nu wordt toegepast op FPV. Hoewel het nog in ontwikkeling is en momenteel niet hetzelfde prestatieniveau haalt als commerciële systemen, biedt het een interessante mogelijkheid om de hobby nog opener te maken.
IP-gebaseerde camera's bieden in theorie een grote flexibiliteit: ze maken aanpassingen en individuele configuraties mogelijk die vaak niet mogelijk zijn met commerciële systemen. Bovendien zou OpenIPC in de toekomst een kosteneffectief alternatief kunnen zijn dat voortdurend wordt verbeterd door de gemeenschap. dit is vergelijkbaar met het ExpressLRS (ELRS) besturingsprotocol. De technologie is echter nog niet volwassen genoeg om het maximale uit de FPV-ervaring te halen. Vooral op gebieden als latentie en stabiliteit moet nog vooruitgang worden geboekt om gelijke tred te houden met gevestigde systemen.
Desondanks laat OpenIPC zien hoe open source projecten de FPV-markt kunnen beïnvloeden en alternatieve manieren kunnen creëren voor piloten om hun systemen aan te passen en te individualiseren.
Hoewel OpenIPC nog steeds in ontwikkeling is als open source firmware, zijn er al enkele interessante FPV producten die gebruikt kunnen worden in combinatie met deze software. Twee producten in het bijzonder hebben voor opschudding gezorgd in de FPV gemeenschap: EMAX Wyvern Link en RunCam WiFiLink. Beide systemen zijn gebaseerd op OpenIPC, waardoor het interessante opties zijn voor FPV piloten die graag willen experimenteren.
Opmerking: Er zijn momenteel alleen alfa-versies van de systemen die hieronder worden gepresenteerd. Verwacht geen foutloos product van hoge kwaliteit. De fabrikanten brengen deze systemen op de markt om meer mensen de kans te geven OpenIPC systemen verder te ontwikkelen. En niet om een perfect product te verkopen.
EMAX Wyvern Link is een OpenIPC-compatibele digitale videozender (VTX) en -ontvanger (VRX), ontworpen voor FPV-piloten die op zoek zijn naar een betaalbaar alternatief voor propriëtaire digitale FPV-systemen. De ontvanger biedt een maximaal zendvermogen tot 2W in de sterkste versie, wat in combinatie met de sterkste zender (800mW) een aanzienlijk bereik en stabiliteit in de video feed mogelijk moet maken. En ja, de ontvanger zendt ook met digitale systemen en vice versa. Daarom noemen we de ontvanger liever Groundunit en de zender Airunit, zoals Joshua Bardwell al zei.
Tot nu toe is EMAX ook de enige fabrikant in de FPV-sector die vier verschillende OpenIPC-producten aanbiedt. Naast de hoogwaardige componenten die hierboven beschreven zijn, zijn dit ook goedkopere producten die eerder gebruikt zullen worden voor kleinere helikopters die minder vermogen nodig hebben voor de transmissie.
De beeldkwaliteit is momenteel beperkt tot 720p (120fps) met ongeveer 4 Mbps, wat aanzienlijk lager is in vergelijking met de systemen met hoge resolutie van DJI of Walksnail (25-50 Mbps). Dit leidt tot blokkering in snel bewegende scènes en vermindert de scherpte van het beeld tijdens snelle manoeuvres.

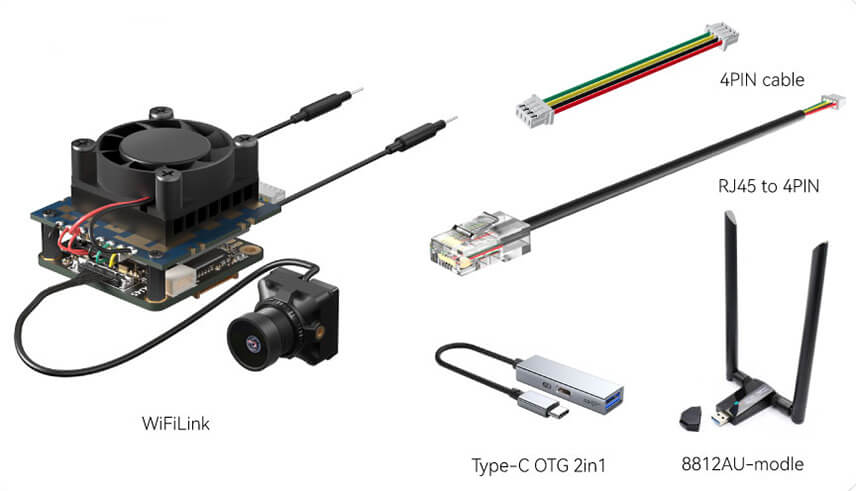
RunCam WiFiLink is een ander product dat compatibel is met OpenIPC en gebaseerd is op WiFi-gebaseerde videostreamingtechnologie. Qua transmissietechnologie lijkt het erg op het EMAX-systeem, maar het biedt ook de optie van Full HD-transmissie. De framerate wordt dan echter gereduceerd tot 60 fps.
Net als bij EMAX is het systeem nog niet geschikt voor professionele toepassingen, omdat WiFi-gebaseerde oplossingen gevoeliger zijn voor latentieproblemen en signaalonderbrekingen in vergelijking met traditionele 5,8 GHz draadloze verbindingen.
Bij RunCam WiFiLink ziet het grondstation er ook iets anders uit dan bij EMAX. De ontvangst vindt plaats via een "klassieke" WiFi-module, die via USB OTG verbonden is met een smartphone en het ontvangen beeld afspeelt.
Over het algemeen biedt OpenIPC een acceptabele latentie van ongeveer 25 ms, wat dicht in de buurt komt van DJI FPV V1. Voor piloten die verder willen experimenteren dan de technologie, bieden EMAX en RunCam veelbelovende platforms, maar ze werken momenteel niet op hetzelfde niveau van stabiliteit als de gevestigde systemen.
Om te helpen bij de ontwikkeling van OpenIPC zijn er verschillende manieren waarop de gemeenschap betrokken kan raken:
Gebruikers kunnen OpenIPC installeren op compatibele apparaten en het uitgebreid testen. Feedback over bugs, prestatieschommelingen of potentiële verbeteringen is essentieel om de firmware te optimaliseren. Dergelijke feedback kan direct worden gedeeld op platforms zoals GitHub of speciale FPV-forums.
Iedereen met programmeerervaring (vooral in C, C++ of Python) kan actief bijdragen aan het verbeteren van de code. OpenIPC is een open source project dat publiek toegankelijk is op GitHub. Ontwikkelaars kunnen nieuwe functies toevoegen, bestaande bugs oplossen en de documentatie verbeteren.
Steun door middel van financiële bijdragen helpt het OpenIPC team om de ontwikkeling voort te zetten, hardwaretests uit te voeren en de serverkosten te dekken.
Deelname aan forums, sociale netwerken en Discord groepen helpt om kennis te verspreiden en andere gebruikers te ondersteunen tijdens installatie en gebruik. Dit soort gemeenschapsonderhoud is essentieel om een groeiende gebruikersgemeenschap te creëren.
Concluderend zijn we benieuwd waar de reis van OpenIPC-systemen in de FPV-wereld ons zal brengen. Welke producten er zullen komen, welke fabrikanten op de kar zullen springen en hoe concurrerend OpenIPC producten zullen zijn in vergelijking met gevestigde systemen zoals DJI of Walksnail. Misschien zijn er binnenkort producten beschikbaar in onze winkel.
Bronnen: OpenIPC, Oscar Liang, Joshua Bardwell, RunCam, EMAX











