Новый год, новая сборка! В этой статье мы расскажем вам, как собрать 5 дюймовый HD FPV дрон для кинематографических съемок и фристайла и что для этого нужно.
Все используемые детали, конечно же, доступны в нашем магазине, и мы очень поможем, если вы заглянете к нам. Спасибо!
Эта статья в блоге также доступна в виде видео. Просто нажмите на play выше или загляните на наш канал YouTube.
Для создания нашего FPV-дрона нам понадобится несколько важных компонентов. К основным компонентам относятся рама, которая формирует структуру дрона, и приемник, принимающий сигналы управления. Четыре мотора приводят в движение пропеллеры, а видеопередатчик и камера передают изображение в реальном времени на FPV-очки. Также необходимы полетный контроллер, "мозг" дрона, и контроллер, управляющий подачей питания на двигатели.
Чтобы собрать FPV-беспилотник, вам понадобятся следующие компоненты:

Для получения видеоизображения мы рекомендуем очки Walksnail Avatar Goggles X, одни из самых популярных очков HD FPV. Для дистанционного управления мы используем Jumper T20 V2. Какое именно радио вы используете, не так важно. Однако она должна поддерживать протокол передачи ELRS. В качестве аккумулятора используется 6S LiPo батарея из Китая Hobbyline, так как мы строим коптер, совместимый с 6S.
Вот оборудование, которое мы использовали:
Для сборки вам также понадобится ряд инструментов. Обязательно нужен паяльник, желательно подходящая паяльная станция, а также припой. Для усадки термоусадочной трубки можно использовать зажигалку или тепловую пушку. Для различных целей пригодятся кабельные стяжки, а также ножницы для зачистки проводов для больших кабелей, бокорезы и маленькие игольчатые плоскогубцы для маленьких кабелей. Для установки пропеллеров вам понадобится инструмент. Самый важный инструмент уже включен в практичный кейс для инструментов Ethix.
Полезный инструмент для каждого пилота FPV:
Теперь, когда мы разобрались с этим, пришло время собрать FPV-беспилотник.
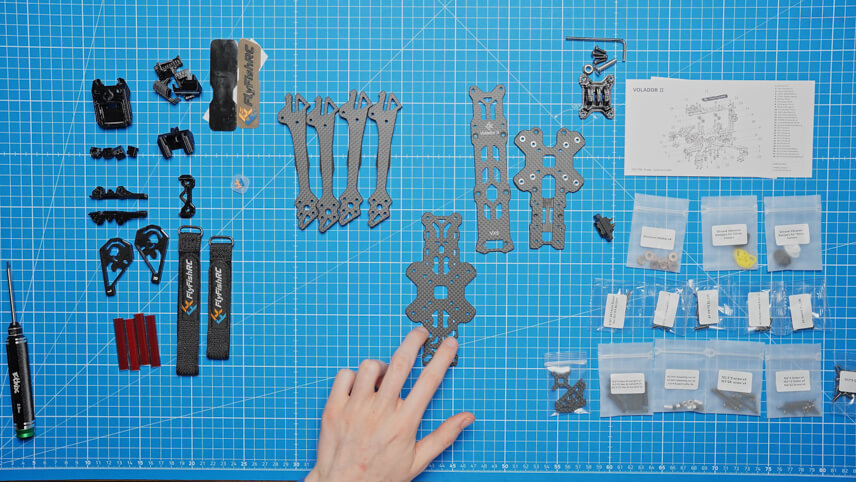
Начнем со сборки рамы. Для начала распакуйте все детали, чтобы получить хороший обзор. Разложите четыре руки рамы так, чтобы они образовали крест в центре. Небольшая плюсовая деталь поможет зафиксировать кронштейны в центре, что облегчит их последующее скручивание. Плотно прижмите эту плюсовую деталь к центру, чтобы кронштейны оказались рядом друг с другом.
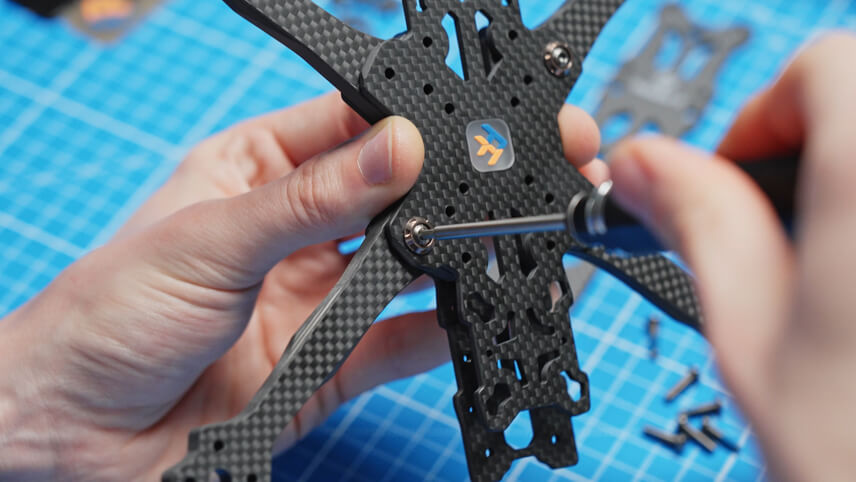
Для крепления кронштейнов вам понадобятся винты M3x12. Переверните коптер и убедитесь, что логотип FlyFish расположен правильно. Для крепления кронштейнов используйте алюминиевые шайбы. Сначала используйте внешние отверстия, затем более длинные винты M3x28 для внутренних отверстий. Оставьте эти винты свободными, пока все винты не будут установлены, затем затяните их.
Как только все винты будут затянуты, в дело вступят первые 3D-печатные TPU-детали. Сначала установите кронштейн антенны на задней панели. С помощью винтов M2x12 и шестигранной отвертки 1,5 мм прикрутите кронштейн к раме снизу. Опять же, оставьте все свободным и затяните только в конце.
Далее мы устанавливаем крепление камеры. Оно состоит из двух карбоновых пластин, двух алюминиевых деталей и небольшой TPU-кромки. Сначала вставьте карбоновые пластины в раму. Затем прикрепите алюминиевые детали к карбоновым пластинам, но прикручивайте их неплотно, чтобы камера все еще помещалась между ними.

Теперь пришло время для стоек - распорок для разных уровней рамы. Они бывают разных размеров: большие, чуть меньше и совсем маленькие для крепления GPS. Сначала прикрепите большие проставки к раме сверху с помощью винтов M3x16. Два расположены в центре рамы и еще два - сзади. Меньшие стойки, которые крепятся винтами M2.5x9, устанавливаются сзади.
Теперь подготовим моторы. Мы используем моторы iFlight Xing2 2306 с KV 1755. Сначала прижмите TPU-протекторы к кронштейнам рамы, чтобы защитить карбон и моторы. Затем возьмите мотор, прижмите его к кронштейну и медленно затяните первые винты. Убедитесь, что мотор сидит на кронштейне ровно, чтобы не повредить резьбу. Также убедитесь, что винты не касаются обмоток двигателя. Повторите этот шаг для всех четырех двигателей.

Теперь настала очередь полетного контроллера и ESC. Сначала достаньте все из упаковки: разъем XT60, винты, запасные кабели и силиконовые демпферы. Контроллер, также известный как ESC, - это микросхема, к которой подключены все двигатели. Полетный контроллер - это "мозг" дрона, к которому впоследствии подключаются все компоненты.
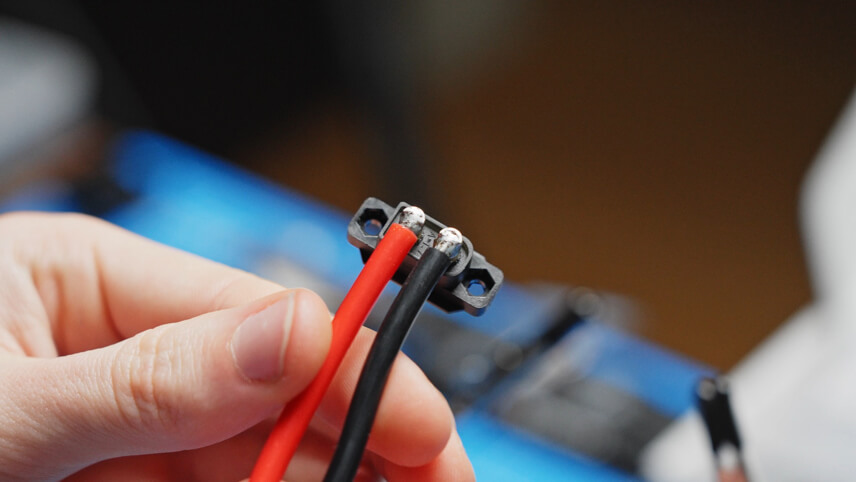
Чтобы соединить кабели разъема XT60 под углом 90°, мы предварительно припаиваем контакты разъема. Кстати, мы используем разъем XT60, который поставляется вместе с рамой.
Кабели также предварительно луженые. Затем припаяйте кабели к контактам разъема XT60. Убедитесь, что между двумя контактами ничего не соприкасается.
Конденсатор устанавливается в рамку снизу, при этом плюс припаивается к плюсу, а минус к минусу. Нам пришлось взять конденсатор меньшего размера (по габаритам), так как тот, что был от ESC, не поместился в рамку.
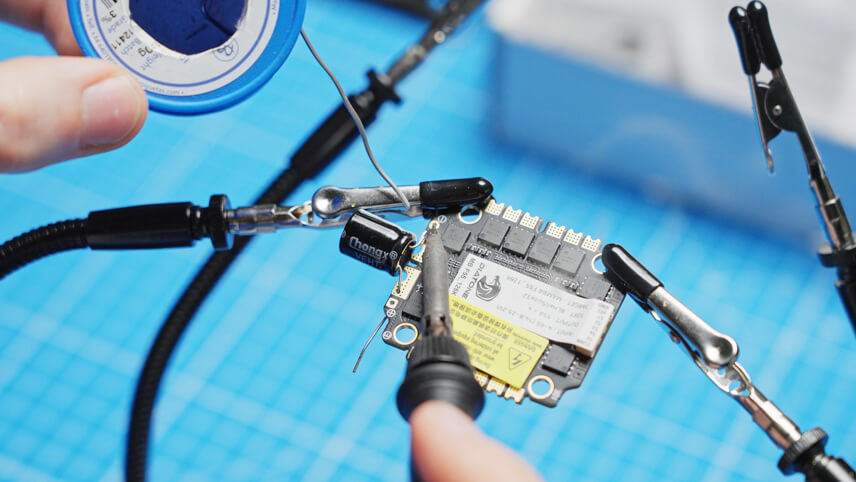
Отрежьте выступающие ножки конденсатора. Затем можно подготовить точки пайки для силовых кабелей на ESC и припаять силовые кабели.
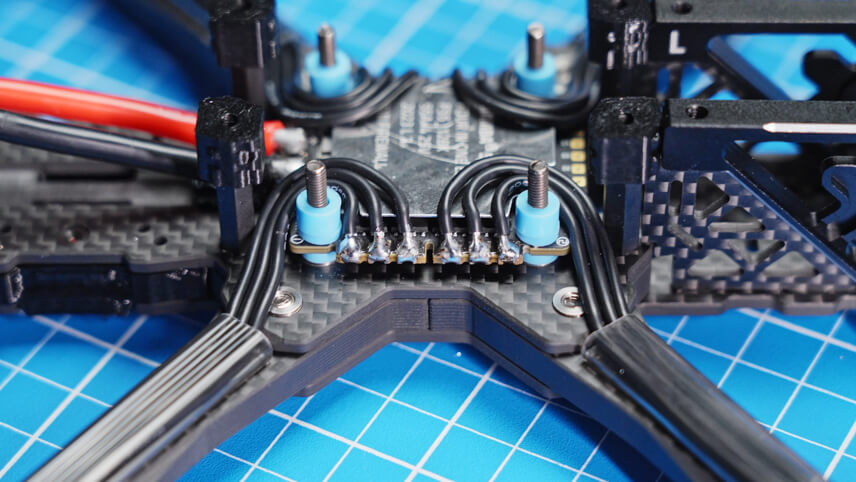
Теперь установим ESC в раму. Для этого протяните силиконовые демпферы через отверстия в раме. Три соединения на каждый мотор предварительно припаяны. Затем установите протекторы кабелей моторов и протяните кабели через эти протекторы, прежде чем припаивать их к ESC. Важно, чтобы кабели не касались друг друга и были подключены только к соответствующей паяльной площадке.
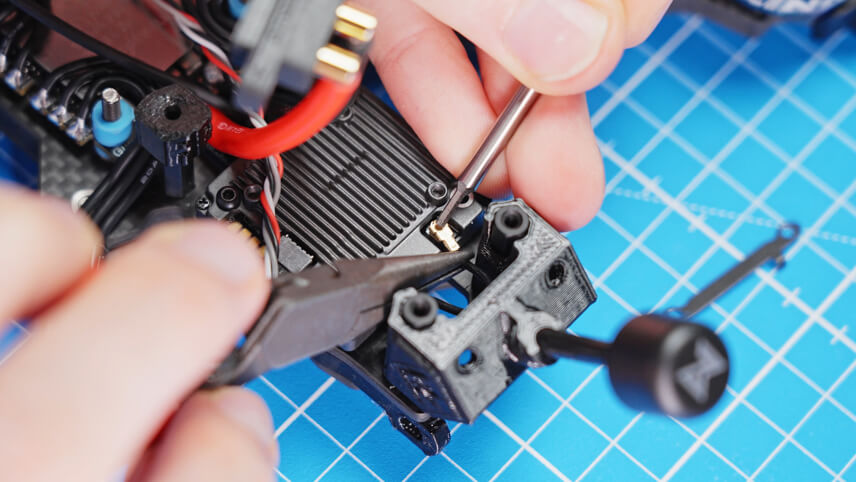
Далее следует подключить видеопередатчик. Мы используем комплект Walksnail Avatar HD Kit V2, состоящий из антенны, видеопередатчика и камеры. Видеопередатчик устанавливается на задней части рамы, а камера - на передней. Кабели проложены так, чтобы видеопередатчик можно было правильно расположить. При помощи винтов и шайб из комплекта поставки прикрутите видеопередатчик на место.
Снимите крышку видеопередатчика, чтобы открыть доступ к U.FL-соединению. Прикрепите антенну к кронштейну и подключите антенну к видеопередатчику. Установите пластину на место и затяните винты.
Чтобы подключить видеопередатчик к полетному контроллеру, припаяйте красный кабель к колодке 9 В, черный кабель - к колодке GND, серый кабель TX - к колодке RX3, а белый кабель RX - к колодке TX3 полетного контроллера. Убедитесь, что RX и TX подключены правильно, чтобы обеспечить бесперебойную связь. Точную схему можно найти в инструкциях к полетному контроллеру и видеопередатчику.
Теперь видеопередатчик полностью установлен, и разъем XT60 можно прижать к стойкам на задней панели.
Вставьте силиконовые демпферы в боковую часть полетного контроллера и подключите кабель контроллера к полетному контроллеру. Установите полетный контроллер в раму и закрепите его гайками из комплекта поставки.
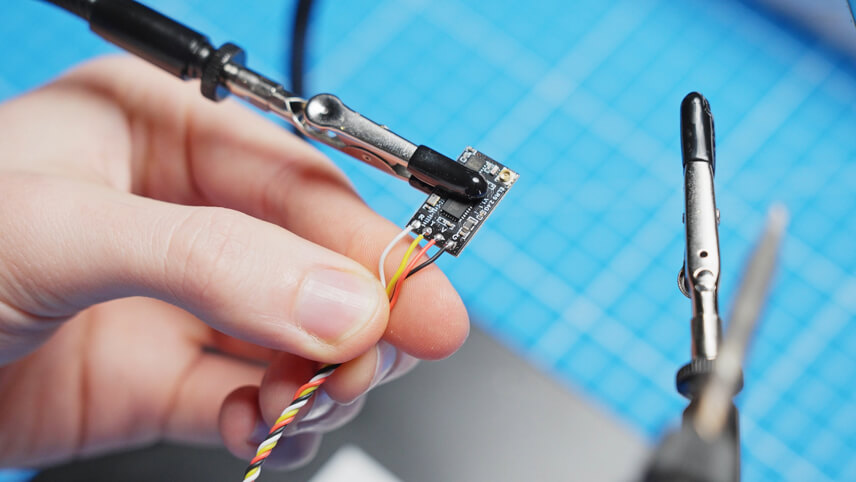
Теперь необходимо установить приемник. Мы используем приемник ELRS, который подключается аналогично видеопередатчику. Обратитесь к инструкции, чтобы найти правильное назначение соединений. Обычно подключаются кабели GND (черный), 5V (красный), TX (серый) и RX (белый). Эти кабели припаиваются к разъему UART1 полетного контроллера: TX к RX, RX к TX, 5V к 5V и GND к GND. Термоусадочная трубка защищает как плату, так и кабели. Установите приемник за камерой, протянув антенну под камерой и закрепив все кабельными стяжками. В качестве альтернативы можно использовать двустороннюю клейкую ленту.
Следующий шаг - крепление верхней пластины. Для этого используются различные винты: винты M2.5 сзади, винты с потайной головкой в центре и винты с более широкой головкой для крепления GoPro спереди. Эти специальные винты предотвращают разрыв TPU в случае падения. Затяните все винты, но не переусердствуйте, чтобы избежать повреждений. Также установите площадку для аккумулятора, правильно выровняв ее и прижав, чтобы предотвратить соскальзывание аккумулятора.
Прежде чем перейти к настройке программного обеспечения, давайте протестируем электронику. Подключите дымовую пробку между батареей и дроном, чтобы обнаружить любые неправильные соединения, не повредив компоненты. Когда все светодиоды на приемнике, полетном контроллере и видеопередатчике загорятся, вы будете готовы к настройке.

Для настройки коптера вам понадобятся две программы на вашем компьютере: конфигуратор ExpressLRS для приемника и конфигуратор Betaflight для полетного контроллера.
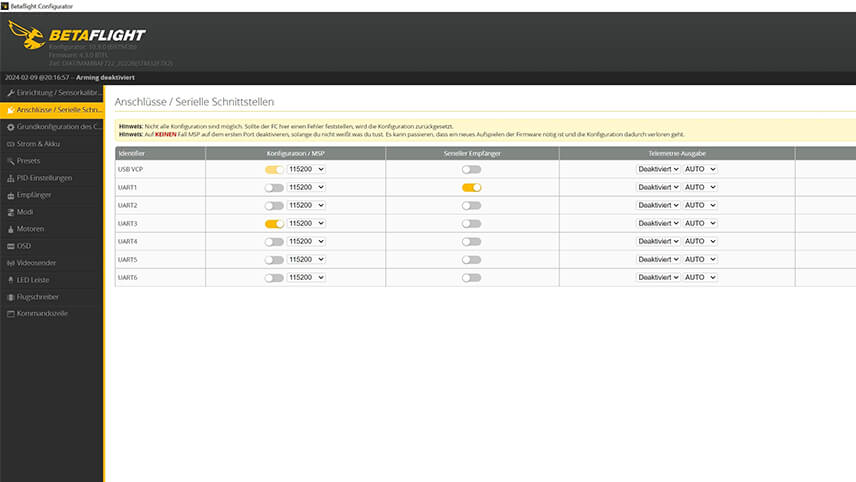
Начните с Betaflight. Подключитесь к полетному контроллеру и убедитесь, что приемник настроен на UART1, а видеопередатчик - на UART3. Активируйте соответствующие соединения и сохраните конфигурацию.
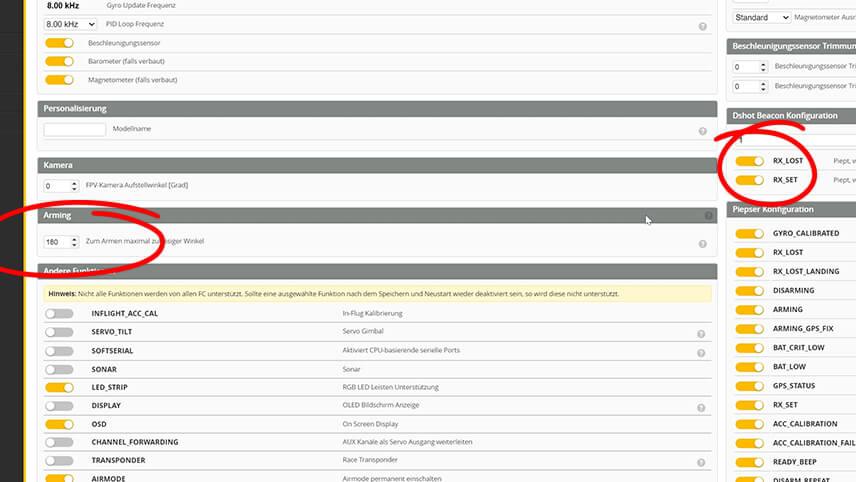
В базовой конфигурации установите угол постановки на охрану 180°, чтобы дрон мог взлетать в любом направлении. Активируйте RX_LOST и RX_SET, чтобы моторы подавали звуковой сигнал при потере соединения. Сохраните настройки. В разделе "Приемник" выберите CRSF, протокол приемника ELRS.
Переключитесь на конфигуратор ExpressLRS. Выберите нужную версию и соответствующий приемник. Подключитесь и установите прошивку. Это может занять несколько минут. Если установка прошла успешно, вы можете переключиться обратно на Betaflight и проверить соединение. Пошевелите стики на пульте управления и проверьте, видны ли отклонения в Betaflight.
Переключитесь на режимы полета в Betaflight и добавьте режимы Pre-Arm, Arm и Angle. Назначьте соответствующие переключатели на пульте дистанционного управления, нажав на "Add Range" и перемещая переключатели. Убедитесь, что диапазоны установлены правильно, чтобы режимы были активны только при переключении переключателей. Сохраните настройки и проверьте, правильно ли отображаются переключатели в Betaflight, когда вы перемещаете их на пульте дистанционного управления.
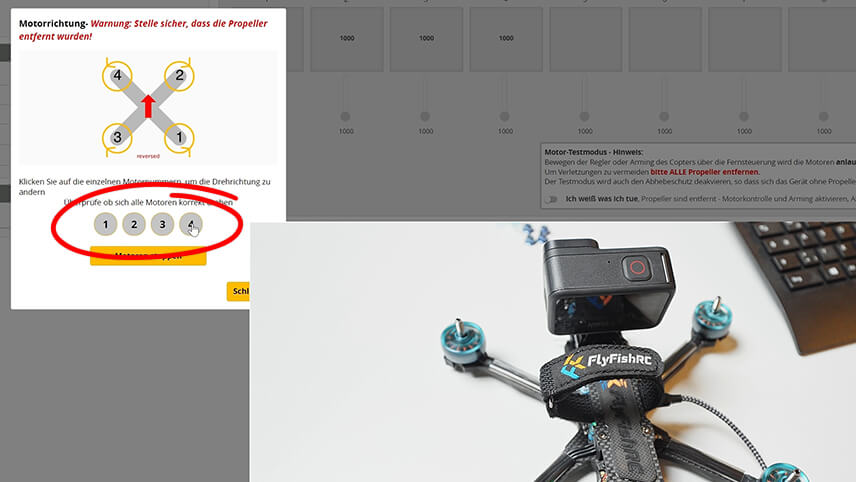
На вкладке "Двигатели" в Betaflight проверьте направление вращения двигателей. Убедитесь, что пропеллеры сняты, и активируйте переключатель, включающий управление моторами. Подключите батарею и поставьте галочку в поле "Reverse motors". Потому что мы хотим, чтобы пропеллеры вращались в обратном направлении. Проверьте направление вращения моторов и нажмите на номер соответствующего мотора, чтобы изменить направление вращения, если оно неправильное. Сохраните настройки и убедитесь, что все двигатели вращаются так, как нужно.
В OSD (On-Screen Display) установите элементы, которые будут отображаться в очках. Включите среднее напряжение ячейки, режим полета, таймер 1 и 2, а также значение RSSI и качество соединения. Установите формат видео HD, чтобы элементы отображались в нужных местах.
Наконец, необходимо подключить очки и видеопередатчик. Включите дрон и подождите, пока видеопередатчик не замигает зеленым. Затем нажмите маленькую кнопку на видеопередатчике и на очках, пока они не будут подключены.

Наконец, установите пропеллеры. Мы используем пропеллеры Gemfan Hurricane синего цвета. Расположите пропеллеры так, чтобы они вращались наружу, чтобы избежать попадания грязи в камеру. Это соответствует ранее определенному направлению вращения двигателя. Закрепите пропеллеры прилагаемыми гайками и затяните их с помощью инструмента для пропеллеров.

Теперь вы готовы к первому испытательному полету! Включите пульт дистанционного управления, подайте питание на очки и подключите аккумулятор к дрону. проверьте звук дрона в полете и убедитесь, что вы не слышите никаких необычных вибраций. Следите за напряжением батареи, чтобы не разрядить ее слишком сильно. Если все прошло успешно, вы успешно собрали свой собственный FPV-беспилотник!
Если вам нужны дополнительные советы для первого полета, посмотрите наше видео. Все детали и инструменты вы можете найти в нашем магазине. Получайте удовольствие от полетов и, пожалуйста, оставьте нам лайк и подписку!