Jauns gads, jauna konstrukcija! Šajā rakstā mēs jums parādīsim, kā samontēt 5 collu HD FPV dronu kinematogrāfiskiem kadriem un brīvajam stilam un kas jums tam nepieciešams.
Visas izmantotās detaļas, protams, ir pieejamas mūsu veikalā, un mums ļoti palīdzēs, ja jūs pie mums iegriezīsieties. Paldies!
Šis bloga ieraksts ir pieejams arī kā video. Vienkārši noklikšķiniet uz atskaņot iepriekš vai apskatiet mūsu YouTube kanālu.
Lai izveidotu mūsu FPV dronu, mums ir nepieciešamas vairākas svarīgas sastāvdaļas. Pamata pamatelementi ir rāmis, kas veido drona konstrukciju, un uztvērējs, kas saņem vadības signālus. Četri motori darbina propellerus, bet video raidītājs un kamera pārraida tiešraidi uz FPV brilles. Nepieciešams arī lidojuma kontrolieris, kas ir drona "smadzenes", un kontrolieris, kas kontrolē motoru barošanu.
Lai izveidotu FPV dronu, jums ir vajadzīgas šīs sastāvdaļas:

Lai saņemtu video attēlu, iesakām izmantot Walksnail Avatar Goggles X, kas ir vienas no populārākajām HD FPV brilles. Tālvadības pults ir Jumper T20 V2. Nav tik svarīgi, kādu tieši radio izmantojat. Tomēr tai jāatbalsta ELRS pārraides protokols. Izmantojamais akumulators ir 6S LiPo akumulators no Ķīnas Hobbyline, jo mēs būvējam 6S saderīgu kopteri.
Šis ir mūsu izmantotais aprīkojums:
Jums būs nepieciešami arī dažādi instrumenti. Nepieciešams lodāmurs, vēlams atbilstoša lodēšanas stacija, kā arī lodmetāls. Termiskās sasmalcināšanas caurulītes saraušanai var izmantot šķiltavu vai karstuma pistoli. Kabeļu saites ir praktiski noderīgas dažādiem lietojumiem, tāpat kā stiepļu noņēmēji lielākiem kabeļiem, sānu griezēji un mazas adatu knaibles mazākiem kabeļiem. Lai piestiprinātu propellerus, jums būs nepieciešams instruments propelleru montāžai. Svarīgākais instruments jau ir iekļauts praktiskajā Ethix instrumentu futrālī.
Noderīgs rīks ikvienam FPV pilotam:
Tagad, kad esam to nokārtojuši, ir pienācis laiks uzbūvēt FPV dronu.
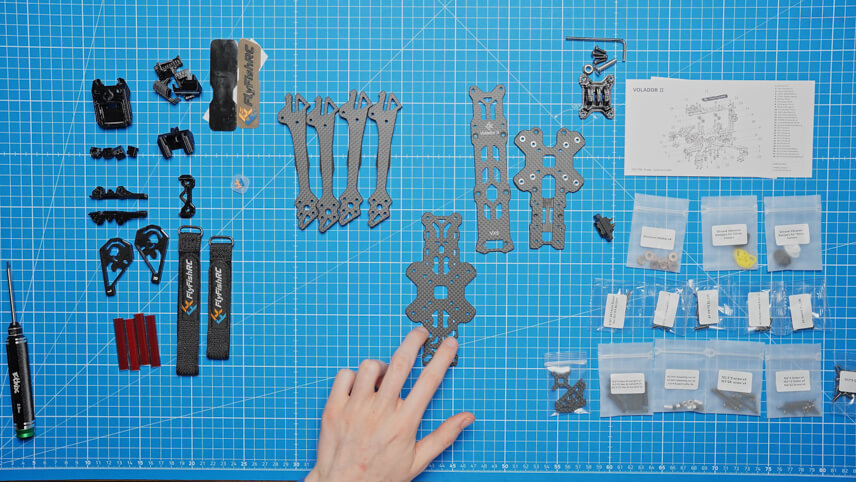
Sāksim ar rāmja montāžu. Vispirms jāizpako visas detaļas, lai gūtu labu pārskatu. Izkārtojiet četras rāmja rokas tā, lai tās centrā veidotu krustu. Neliels plus gabaliņš palīdz nostiprināt sviras centrā, lai vēlāk tās būtu vieglāk saskrūvēt kopā. Spiediet šo plusi stingri centrā tā, lai sviras būtu cieši viena pie otras.
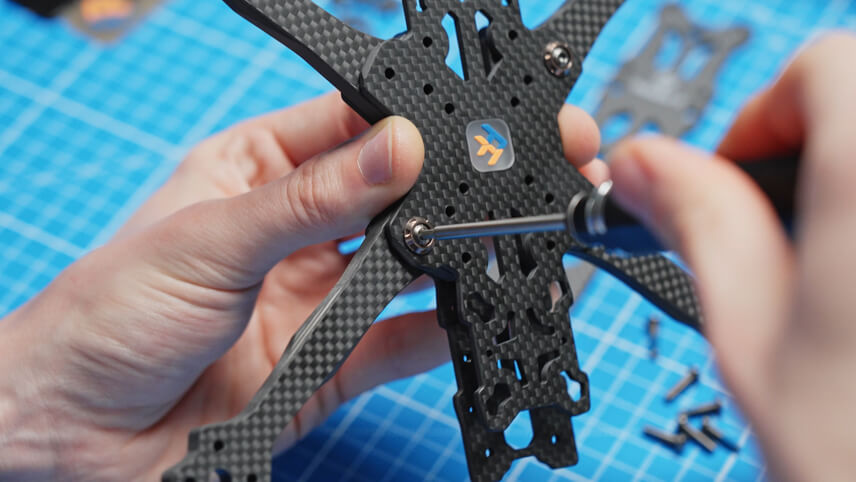
Jums būs vajadzīgas M3x12 skrūves, lai piestiprinātu rokturus. Pagrieziet helikopteru un pārliecinieties, ka FlyFish logotips ir novietots pareizi. Izmantojiet alumīnija paplāksnes, lai piestiprinātu rokas. Vispirms izmantojiet ārējos caurumus, pēc tam iekšējiem caurumiem izmantojiet garākas M3x28 skrūves. Atstājiet šīs skrūves vaļējas, līdz visas skrūves ir piestiprinātas, pēc tam tās pievilciet.
Tiklīdz visas skrūves ir pieskrūvētas, sāk darboties pirmās 3D drukātās TPU detaļas. Vispirms aizmugurē uzstādiet antenas kronšteinu. Izmantojiet M2x12 skrūves un 1,5 mm sešstūra skrūvgriezi, lai ieskrūvētu kronšteinu rāmī no apakšas. Arī šajā gadījumā atstājiet visu vaļēju un pievelciet tikai beigās.
Tālāk uzmontējiet kameras stiprinājumu. Tas sastāv no divām oglekļa plāksnītēm, divām alumīnija daļām un neliela TPU uzmalas. Vispirms iespiežiet oglekļa plāksnes rāmī. Pēc tam piestipriniet alumīnija daļas pie oglekļa plāksnēm, bet pieskrūvējiet tās tikai vaļīgi, lai kamera joprojām ietilptu starp tām.

Tagad ir pienācis laiks izmantot statņus - starplikas dažādiem rāmja līmeņiem. Ir dažādi izmēri: lieli, nedaudz mazāki un ļoti mazi GPS stiprinājumam. Vispirms ar M3x16 skrūvēm no augšas piestipriniet pie rāmja lielās atstatnes. Divas ir novietotas rāmja centrā un vēl divas aizmugurē. Mazākās statnes, ko piestiprina ar M2,5x9 skrūvēm, ir aizmugurē.
Tagad mēs sagatavojam motorus. Mēs izmantojam iFlight Xing2 2306 motorus ar 1755 KV. Vispirms uzspiediet TPU roku aizsargus uz rāmja rokām, lai aizsargātu oglekli un motorus. Tad ņemiet motoru, piestipriniet to pie rokas un lēnām pievelciet pirmās skrūves. Pārliecinieties, ka motors atrodas taisni uz sviras, lai netiktu bojāta vītne. Tāpat jāpārliecinās, ka skrūves neskar motora tinumus. Atkārtojiet šo darbību visiem četriem motoriem.

Tagad pienāk kārta lidojuma kontrolierim un ESC. Vispirms izņemiet visu no iepakojuma: XT60 savienotāju, skrūves, rezerves kabeļus un silikona slāpētājus. Kontrolieris, ko dēvē arī par ESC, ir mikroshēma, kurai ir pieslēgti visi motori. Lidojuma kontrolieris ir drona "smadzenes", kurām vēlāk tiek pieslēgtas visas sastāvdaļas.
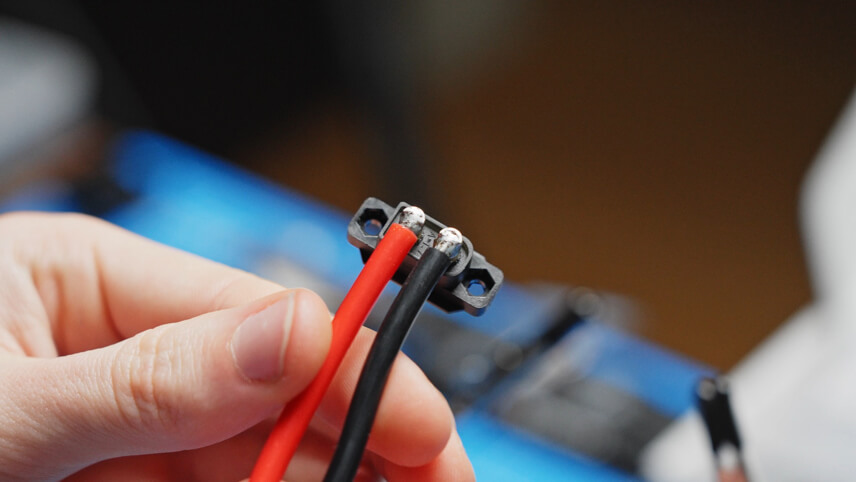
Lai savienotu XT60 savienotāja kabeļus 90° leņķī, vispirms iepriekš pielutinām savienotāja kontaktus. Starp citu, mēs izmantojam XT60 savienotāju, kas tika piegādāts kopā ar rāmi.
Arī kabeļi ir iepriekš lodēti. Pēc tam kabeļus pielodē pie XT60 savienotāja kontaktiem. Pārliecinieties, ka starp abiem kontaktiem nekas nesaskaras.
Kondensatoru ievieto rāmītī no apakšas, plusu pielodējot pie plusa un mīnusu pie mīnusa. Mums nācās iegādāties mazāku kondensatoru (izmēra ziņā), jo tas, kas bija no ESC, neiekļaujas rāmītī.
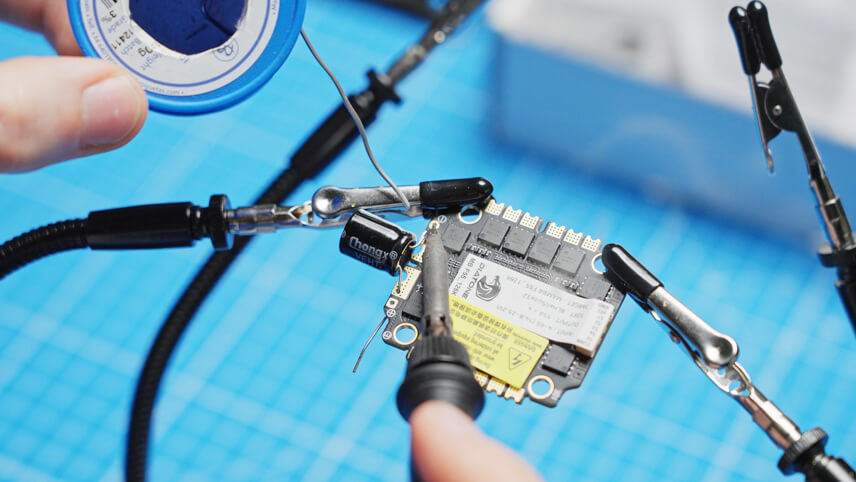
Nogrieziet kondensatora izvirzītās kājas. Pēc tam varat sagatavot lodēšanas punktus strāvas kabeļiem uz ESC un pielodēt arī strāvas kabeļus.
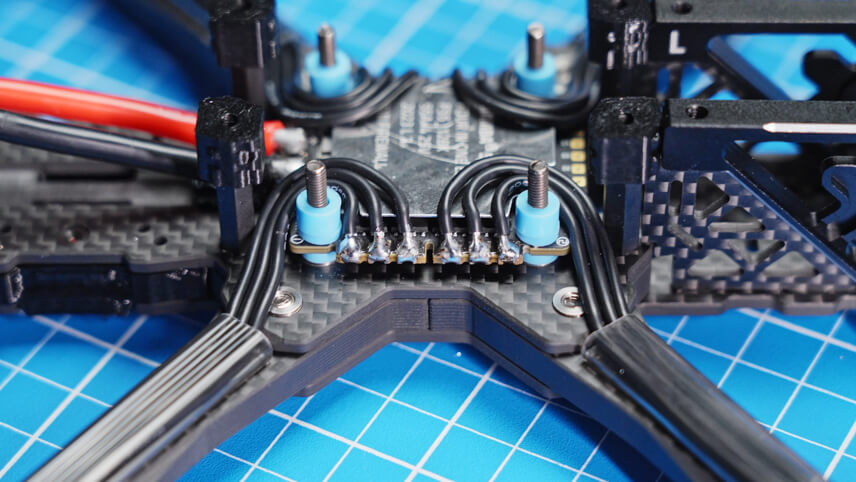
Tagad mēs montējam ESC rāmī. Lai to izdarītu, izvelciet silikona amortizatorus caur caurumiem rāmī. Trīs savienojumi katram motoram ir iepriekš pielodēti. Pēc tam pievienojiet motoru kabeļu aizsargus un izstumiet kabeļus caur šiem aizsargiem, pirms tos pielodēt pie ESC. Ir svarīgi, lai kabeļi viens otram nesaskaras un būtu savienoti tikai ar attiecīgo lodēšanas padu.
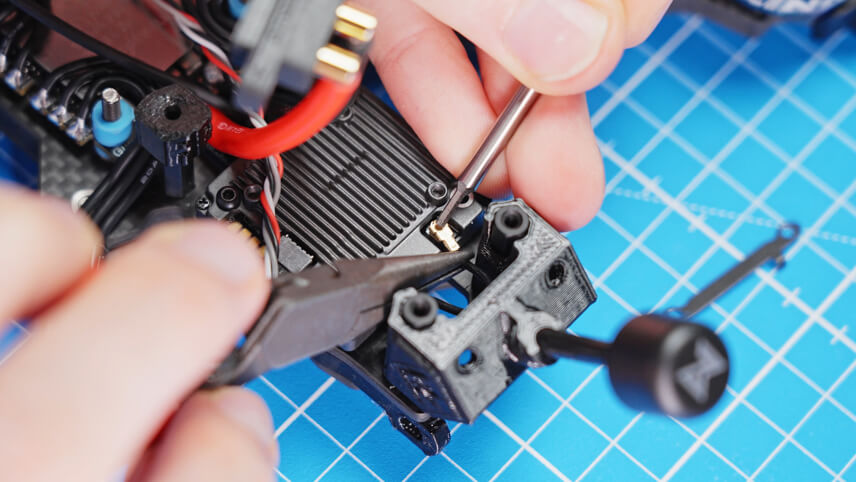
Nākamais ir video raidītāja sistēma. Mēs izmantojam Walksnail Avatar HD Kit V2, kas sastāv no antenas, video raidītāja un kameras. Video raidītājs ir uzstādīts rāmja aizmugurē, bet kamera - priekšpusē. Kabeļi ir izvietoti tā, lai video raidītāju varētu pareizi novietot. Lai ieskrūvētu video raidītāju vietā, izmantojiet komplektā iekļautās skrūves un paplāksnes.
Noņemiet video raidītāja pārsegu, lai atklātu U.FL savienojumu. Pievienojiet antenu kronšteinam un pievienojiet antenu video raidītājam. No jauna uzlieciet plāksnīti un pievelciet skrūves.
Lai savienotu video raidītāju ar lidojuma kontrolieri, pielodējiet sarkano kabeli pie 9 V paliktņa, melno kabeli pie GND paliktņa, pelēko TX kabeli pie RX3 paliktņa un balto RX kabeli pie lidojuma kontroliera TX3 paliktņa. Pārliecinieties, ka RX un TX ir pareizi savienoti, lai nodrošinātu vienmērīgu saziņu. Precīzu shēmu var atrast FC un video raidītāja instrukcijā.
Tagad video raidītājs ir pilnībā uzstādīts, un XT60 savienotāju var piespiest pie aizmugurē esošajiem statņiem.
Ievietojiet silikona amortizatorus lidojuma kontroliera sānos un savienojiet kontroliera kabeli ar lidojuma kontrolieri. Iemontējiet lidojuma kontrolieri rāmī un nostipriniet to ar pievienotajiem uzgriežņiem.
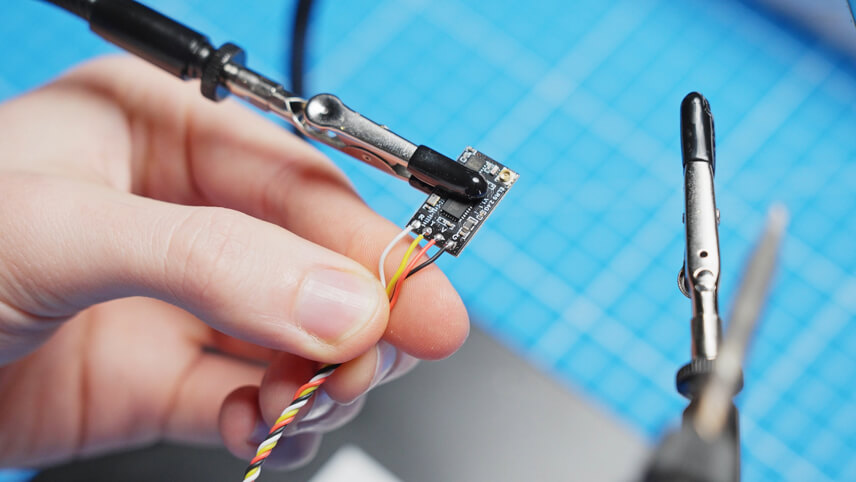
Tagad uztvērējs ir uzstādīts. Mēs izmantojam ELRS uztvērēju, kas tiek pievienots līdzīgi kā video raidītājs. Skatiet instrukcijas, lai uzzinātu pareizu savienojumu piešķiršanu. Parasti savienojumi ir GND (melns), 5V (sarkans), TX (pelēks) un RX (balts). Šie vadi ir pielodēti pie lidojuma kontroliera UART1 savienojuma: TX uz RX, RX uz TX, 5V uz 5V un GND uz GND. Saraušanās caurulītes aizsargā gan plati, gan kabeļus. Uzstādiet uztvērēju aiz kameras, izvelkot antenu zem kameras un nostiprinot visu ar kabeļu saitēm. Alternatīvi varat izmantot abpusēji līmējošu lentu.
Nākamais solis ir uzstādīt augšējo plāksni. Šim nolūkam tiek izmantotas dažādas skrūves: M2,5 skrūves aizmugurē, skrūves ar iegremdētu galvu centrā un skrūves ar plašāku galvu GoPro stiprinājumam priekšpusē. Šīs īpašās skrūves pasargā TPU no izplīsuma kritiena gadījumā. Pievelciet visas skrūves, bet nepārspīlējiet, lai izvairītos no bojājumiem. Uzstādiet arī akumulatora paliktni, to pareizi izlīdzinot un piespiežot, lai novērstu akumulatora izslīdēšanu.
Pirms pāriet pie programmatūras konfigurēšanas, pārbaudīsim elektroniku. Savienojiet dūmu aizbāzni starp akumulatoru un dronu, lai atklātu jebkādus nepareizus savienojumus, nebojājot komponentus. Kad uz uztvērēja, lidojuma kontroliera un video raidītāja iedegas visi LED indikatori, jūs esat gatavi konfigurēšanai.

Lai konfigurētu dronu, datorā būs nepieciešamas divas programmas: ExpressLRS konfigurators uztvērējam un Betaflight konfigurators lidojuma kontrollerim.
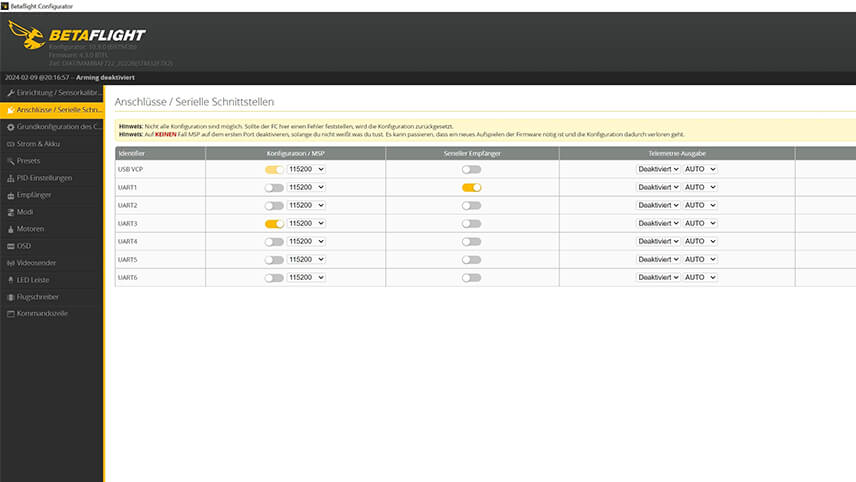
Sāciet ar Betaflight. Pievienojiet lidojumu kontrolieri un pārliecinieties, ka uztvērējs ir iestatīts uz UART1 un video raidītājs uz UART3. Aktivizējiet atbilstošos savienojumus un saglabājiet konfigurāciju.
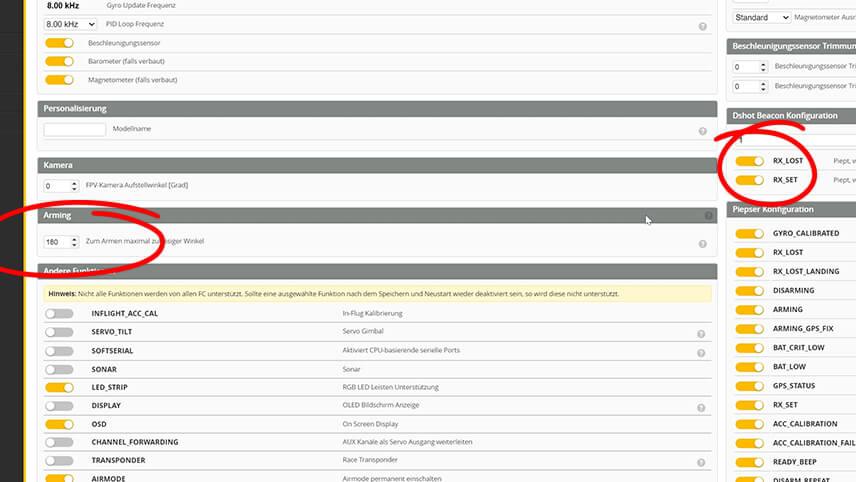
Pamata konfigurācijā iestatiet apbruņošanās leņķi 180°, lai drons varētu pacelties jebkurā virzienā. Aktivizējiet RX_LOST un RX_SET, lai motori signalizētu, ja tiek zaudēts savienojums. Saglabājiet iestatījumus. Sadaļā "Receiver" (Uztvērējs) atlasiet CRSF, ELRS uztvērēja protokolu.
Pārslēdziet uz ExpressLRS konfiguratoru. Izvēlieties pareizo versiju un atbilstošo uztvērēju. Pievienojiet un instalējiet programmaparatūru. Tas var aizņemt dažas minūtes. Ja uzstādīšana ir bijusi veiksmīga, varat pārslēgties atpakaļ uz Betaflight un pārbaudīt savienojumu. Pārvietojiet tālvadības pults stūres un pārbaudiet, vai novirzes ir redzamas Betaflight programmā.
Betaflight programmā pārslēdzieties uz lidojuma režīmiem un pievienojiet iepriekšējas rokas, rokas un leņķa režīmus. Piešķiriet attiecīgos slēdžus tālvadības pultī, noklikšķinot uz "Add Range" (Pievienot diapazonu) un pārvietojot slēdžus. Pārliecinieties, ka diapazoni ir pareizi iestatīti, lai režīmi būtu aktīvi tikai tad, kad slēdži ir pārlikti. Saglabājiet iestatījumus un pārbaudiet, vai slēdži tiek pareizi parādīti Betaflight programmā, kad tos pārvietojat uz tālvadības pults.
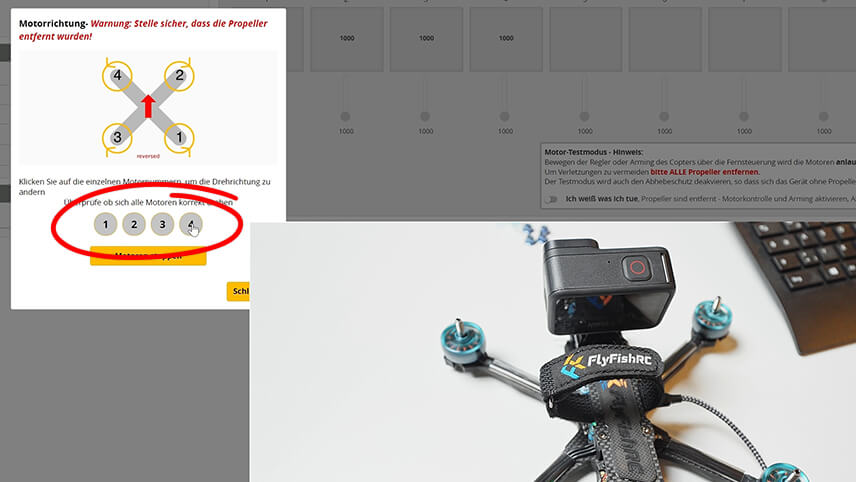
Betaflight cilnē "Motors" (Motori) pārbaudiet motoru rotācijas virzienu. Pārliecinieties, ka propelleri ir noņemti, un aktivizējiet slēdzi, kas ieslēdz motoru vadību. Pievienojiet akumulatoru un atzīmējiet izvēles rūtiņu "Reverse motors" ("Motoru apgriešana"). Jo mēs vēlamies, lai propelleri grieztos ārā rotācijas virzienā. Pārbaudiet motoru rotācijas virzienu un noklikšķiniet uz attiecīgā motora numura, lai mainītu rotācijas virzienu, ja tas nav pareizs. Saglabājiet iestatījumus un pārliecinieties, ka visi motori griežas, kā paredzēts.
OSD (ekrāna displejā) iestatiet elementus, kas tiks rādīti brillēs. Aktivizējiet vidējo šūnu spriegumu, lidojuma režīmu, 1. un 2. taimeri, kā arī RSSI vērtību un savienojuma kvalitāti. Iestatiet video formātu HD, lai elementi tiktu parādīti pareizajās vietās.
Visbeidzot ir jāpievieno brilles un video raidītājs. Ieslēdziet dronu un pagaidiet, līdz video raidītājs mirgo zaļi. Pēc tam nospiediet mazo pogu uz video raidītāja un uz aizsargbrillēm, līdz abi ir savienoti.

Visbeidzot, uzmontējiet propellerus. Mēs izmantojam Gemfan Hurricane propellerus zilā krāsā. Izvietojiet propellerus tā, lai tie grieztos uz āru un izvairītos no netīrumu izmešanas kamerā. Tas atbilst iepriekš noteiktajam motora rotācijas virzienam. Piestipriniet propellerus ar pievienotajiem uzgriežņiem un pievelciet tos ar propelleru instrumentu.

Tagad esat gatavs pirmajam testa lidojumam! Ieslēdziet tālvadības pulti, pievadiet brilles ar strāvu un pievienojiet dronam akumulatoru. pārbaudiet drona skaņu lidojuma laikā un pārliecinieties, ka nedzirdat nekādas neparastas vibrācijas. Sekojiet līdzi akumulatora spriegumam, lai akumulatoru neizlādētu pārāk dziļi. Ja viss ir kārtībā, jūs esat veiksmīgi uzbūvējuši savu FPV dronu!
Ja jums ir nepieciešami papildu padomi pirmajam lidojumam, noskatieties mūsu video. Visas detaļas un instrumentus varat atrast mūsu veikalā. Priecīgus lidojumus un, lūdzu, atstājiet mums patīk un abonementu!