Nieuw jaar, nieuwe bouw! In dit artikel laten we je zien hoe je een 5 inch HD FPV drone voor filmopnames en freestyle in elkaar zet en wat je daarvoor nodig hebt.
Alle gebruikte onderdelen zijn natuurlijk verkrijgbaar in onze shop en het helpt ons enorm als je even langskomt. Bedankt!
Deze blogpost is ook beschikbaar als video. Klik gewoon op play hierboven of neem een kijkje op ons YouTube-kanaal.
We hebben verschillende belangrijke onderdelen nodig om onze FPV drone te bouwen. De basisbouwstenen zijn het frame, dat de structuur van de drone vormt, en de ontvanger, die de besturingssignalen ontvangt. Vier motoren drijven de propellers aan, terwijl de videozender en de camera het live-beeld overbrengen naar de FPV-bril. De vluchtcontroller, het "brein" van de drone, en de controller, die de stroomtoevoer naar de motoren regelt, zijn ook nodig.
Je hebt deze onderdelen nodig om een FPV drone te bouwen:

Voor de ontvangst van het videobeeld raden we de Walksnail Avatar Goggles X aan, een van de populairste HD FPV-brillen. Voor de afstandsbediening gebruiken we de Jumper T20 V2. Welke radio je precies gebruikt is niet zo belangrijk. Hij moet echter wel het ELRS-transmissieprotocol ondersteunen. De gebruikte batterij is een 6S LiPo batterij van China Hobbyline, omdat we een 6S-compatibele helikopter bouwen.
Dit is de apparatuur die we hebben gebruikt:
Je hebt ook wat gereedschap nodig voor de bouw. Een soldeerbout is essentieel, bij voorkeur een goed soldeerstation, evenals soldeer. Een aansteker of warmtepistool kan worden gebruikt om de krimpkous te krimpen. Kabelbinders zijn praktisch voor verschillende toepassingen, net als draadstrippers voor grotere kabels, zijkniptangen en kleine naaldbektangen voor kleinere kabels. Je hebt gereedschap nodig om de propellers te monteren. Het belangrijkste gereedschap zit al in de praktische Ethix gereedschapskoffer.
Een handig gereedschap voor elke FPV-piloot:
Nu we dat uit de weg hebben, is het tijd om de FPV drone te bouwen.
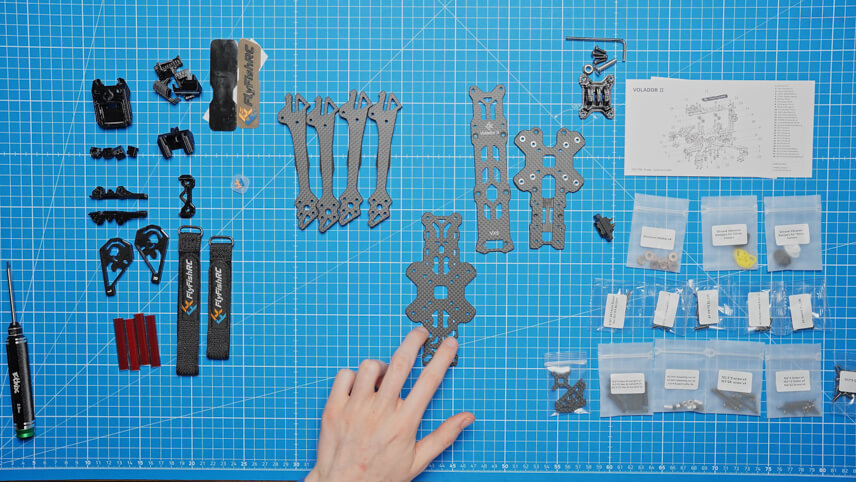
Laten we beginnen met het in elkaar zetten van het frame. Pak eerst alle onderdelen uit om een goed overzicht te krijgen. Leg de vier armen van het frame zo neer dat ze in het midden een kruis vormen. Een klein plusstukje helpt om de armen in het midden vast te zetten, wat het later makkelijker maakt om ze aan elkaar te schroeven. Druk dit plusstuk stevig in het midden zodat de armen dicht bij elkaar zitten.
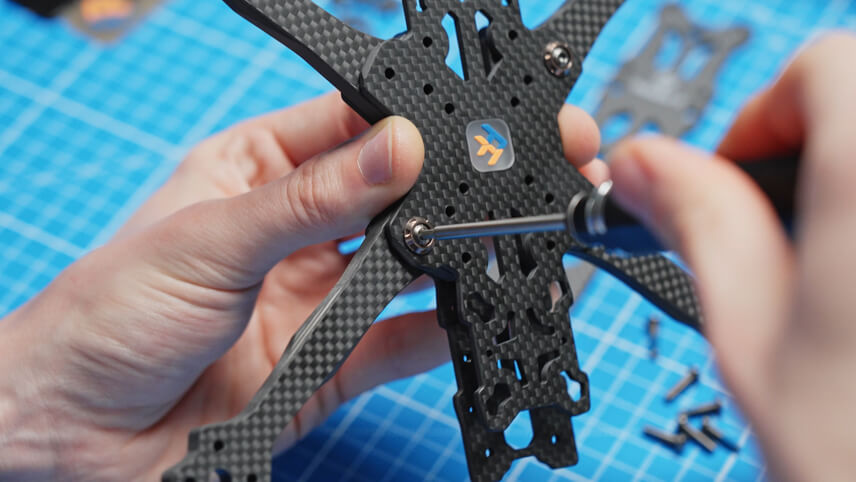
Je hebt M3x12 schroeven nodig om de armen te bevestigen. Draai de helikopter om en zorg ervoor dat het FlyFish logo correct gepositioneerd is. Gebruik aluminium sluitringen om de armen te bevestigen. Gebruik eerst de buitenste gaten en daarna de langere M3x28 schroeven voor de binnenste gaten. Laat deze schroeven los totdat alle schroeven zijn aangebracht en draai ze dan vast.
Zodra alle schroeven vastzitten, komen de eerste 3D-geprinte TPU-onderdelen aan de beurt. Monteer eerst een antennebeugel aan de achterkant. Gebruik M2x12 schroeven en een 1,5 mm zeskantschroevendraaier om de beugel van onderaf in het frame te schroeven. Nogmaals, laat alles los en draai het pas aan het einde vast.
Vervolgens monteren we de camerabeugel. Deze bestaat uit twee carbon platen, twee aluminium delen en een klein TPU lipje. Druk eerst de carbonplaten in het frame. Bevestig vervolgens de aluminium delen aan de carbon platen, maar schroef ze slechts losjes vast zodat de camera er nog tussen past.

Nu is het tijd voor de standoffs, de afstandhouders voor de verschillende niveaus van het frame. Er zijn verschillende maten: groot, iets kleiner en heel klein voor de GPS-bevestiging. Bevestig eerst de grote standoffs aan het frame van bovenaf met M3x16-schroeven. Twee worden in het midden van het frame geplaatst en nog eens twee aan de achterkant. De kleinere standoffs, die je bevestigt met M2,5x9 schroeven, komen aan de achterkant.
Nu bereiden we de motoren voor. We gebruiken iFlight Xing2 2306 motoren met 1755 KV. Druk eerst de TPU armbeschermers op de armen van het frame om het carbon en de motoren te beschermen. Neem dan een motor, houd deze op de arm en draai langzaam de eerste schroeven vast. Zorg ervoor dat de motor recht op de arm zit zodat de schroefdraad niet beschadigd raakt. Zorg er ook voor dat de schroeven de motorwikkelingen niet raken. Herhaal deze stap voor alle vier de motoren.

Nu is het de beurt aan de vluchtcontroller en de ESC. Haal eerst alles uit de verpakking: de XT60-connector, de schroeven, de reservekabels en de siliconen dempers. De controller, ook wel ESC genoemd, is de chip waarop alle motoren zijn aangesloten. De vluchtcontroller is het "brein" van de drone, waarop later alle componenten worden aangesloten.
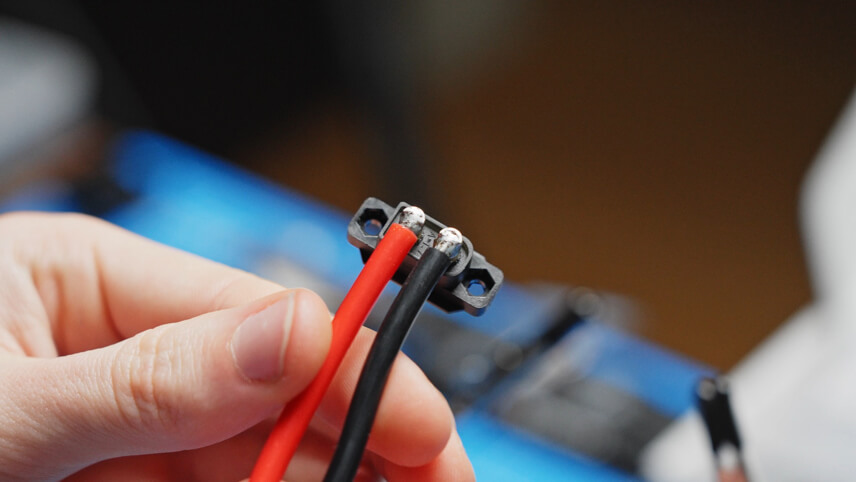
Om de kabels van de XT60 connector in een hoek van 90° aan te sluiten, solderen we eerst de contacten van de connector voor. We gebruiken overigens de XT60-connector die bij het frame is geleverd.
De kabels zijn ook voorgesoldeerd. Vervolgens solderen we de kabels aan de contacten van de XT60-connector. Zorg ervoor dat er niets tussen de twee contacten komt.
De condensator wordt van onderaf in het frame geplaatst, met plus aan plus gesoldeerd en min aan min. We moesten een kleinere condensator nemen (qua afmetingen) omdat die van de ESC niet in het frame past.
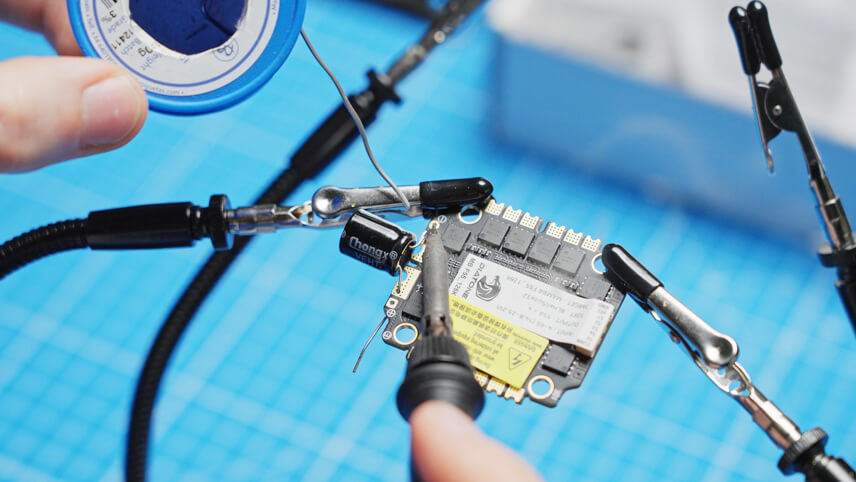
Knip de uitstekende pootjes van de condensator af. Daarna kunt u de soldeerpunten voor de voedingskabels op de ESC voorbereiden en de voedingskabels ook solderen.
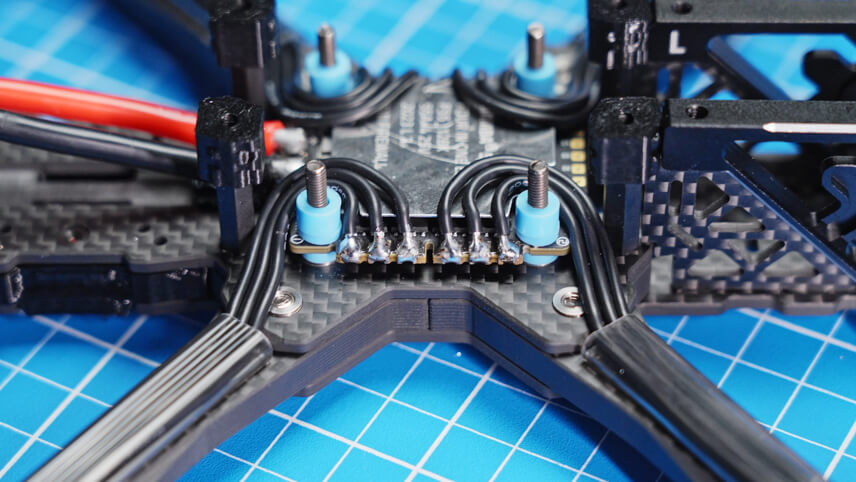
Nu monteren we de ESC in het frame. Trek hiervoor de siliconen dempers door de gaten in het frame. De drie aansluitingen per motor zijn voorgesoldeerd. Bevestig vervolgens de motorkabelbeschermers en duw de kabels door deze beschermers voordat u ze aan de ESC soldeert. Het is belangrijk dat de kabels elkaar niet raken en alleen op het betreffende soldeerpad worden aangesloten.
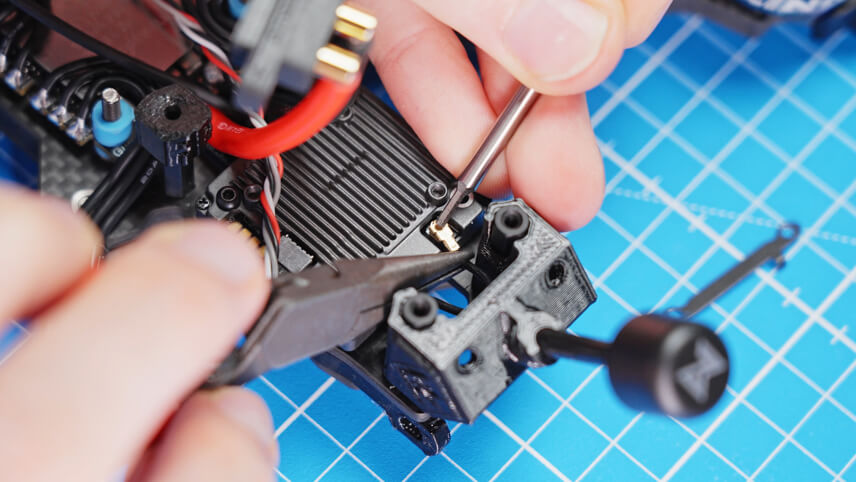
De volgende stap is het videozendersysteem. We gebruiken de Walksnail Avatar HD Kit V2, bestaande uit antenne, videozender en camera. De videozender wordt aan de achterkant van het frame gemonteerd en de camera aan de voorkant. De kabels worden zo gelegd dat de videozender correct kan worden gepositioneerd. Gebruik de meegeleverde schroeven en sluitringen om de videotransmitter vast te schroeven.
Verwijder het afdekplaatje van de videozender om de U.FL-aansluiting bloot te leggen. Bevestig de antenne aan de beugel en sluit de antenne aan op de videozender. Plaats de afdekplaat terug en draai de schroeven vast.
Om de videozender aan te sluiten op de vluchtbesturingseenheid soldeert u de rode kabel aan het 9V-blok, de zwarte kabel aan het GND-blok, de grijze TX-kabel aan het RX3-blok en de witte RX-kabel aan het TX3-blok van de vluchtbesturingseenheid. Zorg ervoor dat RX en TX correct zijn aangesloten voor een soepele communicatie. Het exacte schema kunt u vinden in de instructies van de FC en de videozender.
De videozender is nu volledig geïnstalleerd en de XT60-connector kan op de standoffs aan de achterkant worden gedrukt.
Plaats de siliconen dempers in de zijkant van de vluchtcontroller en sluit de kabel van de controller aan op de vluchtcontroller. Monteer de vluchtcontroller in het frame en zet hem vast met de meegeleverde moeren.
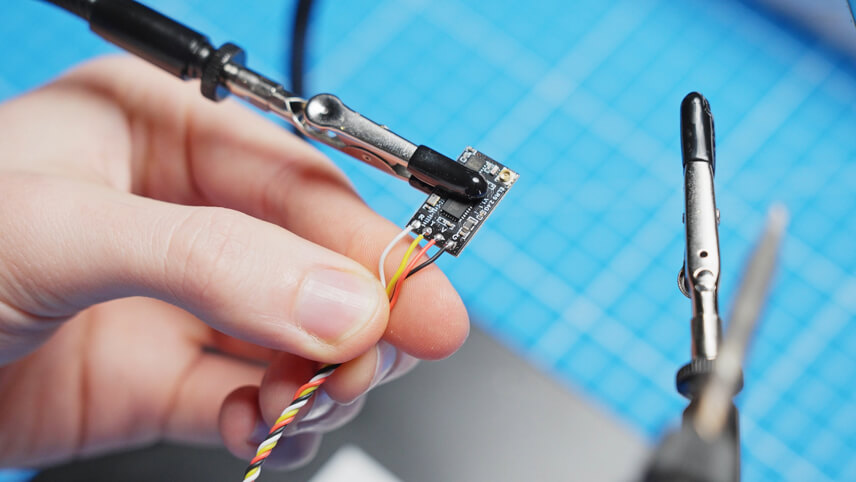
Nu wordt de ontvanger geïnstalleerd. We gebruiken een ELRS-ontvanger, die op dezelfde manier wordt aangesloten als de videozender. Raadpleeg de instructies voor de juiste toewijzing van de aansluitingen. Normaal zijn de aansluitingen GND (zwart), 5V (rood), TX (grijs) en RX (wit). Deze kabels worden gesoldeerd aan de UART1-aansluiting van de vluchtbesturing: TX aan RX, RX aan TX, 5V aan 5V en GND aan GND. De krimpkous beschermt zowel de printplaat als de kabels. Monteer de ontvanger achter de camera door de antenne onder de camera te trekken en alles vast te zetten met kabelbinders. Je kunt ook dubbelzijdig plakband gebruiken.
De volgende stap is het monteren van de bovenplaat. Hiervoor worden verschillende schroeven gebruikt: M2,5 schroeven aan de achterkant, verzonken schroeven in het midden en schroeven met een bredere kop voor de GoPro-bevestiging aan de voorkant. Deze speciale schroeven voorkomen dat het TPU bij een val uitscheurt. Draai alle schroeven aan, maar niet te hard om schade te voorkomen. Bevestig ook het batterijkussentje door het goed uit te lijnen en vast te drukken om te voorkomen dat de batterij wegglijdt.
Voordat we verder gaan met de softwareconfiguratie, testen we eerst de elektronica. Sluit een rookstop aan tussen de batterij en de drone om eventuele verkeerde verbindingen op te sporen zonder de componenten te beschadigen. Als alle LED's op de ontvanger, vluchtregelaar en videozender oplichten, ben je klaar voor de configuratie.

Om de helikopter in te stellen, heb je twee programma's nodig op je computer: de ExpressLRS configurator voor de ontvanger en de Betaflight configurator voor de vluchtbesturing.
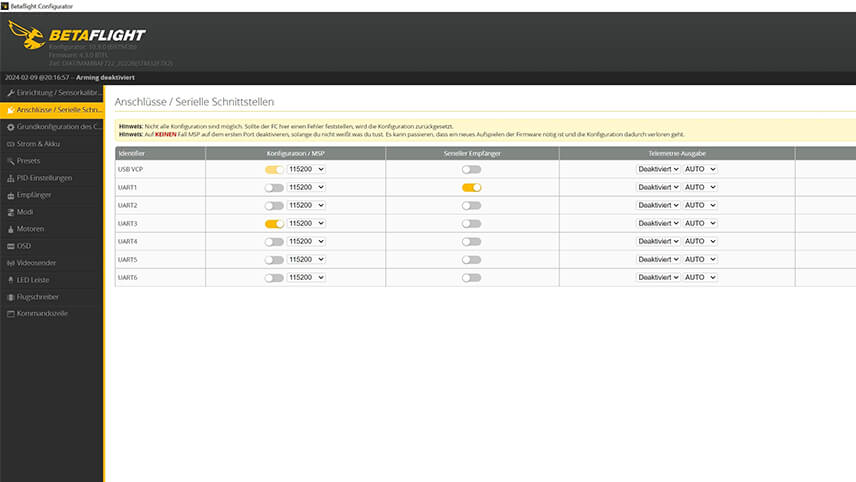
Begin met Betaflight. Maak verbinding met de vluchtbesturingseenheid en zorg ervoor dat de ontvanger is ingesteld op UART1 en de videozender op UART3. Activeer de bijbehorende aansluitingen en sla de configuratie op.
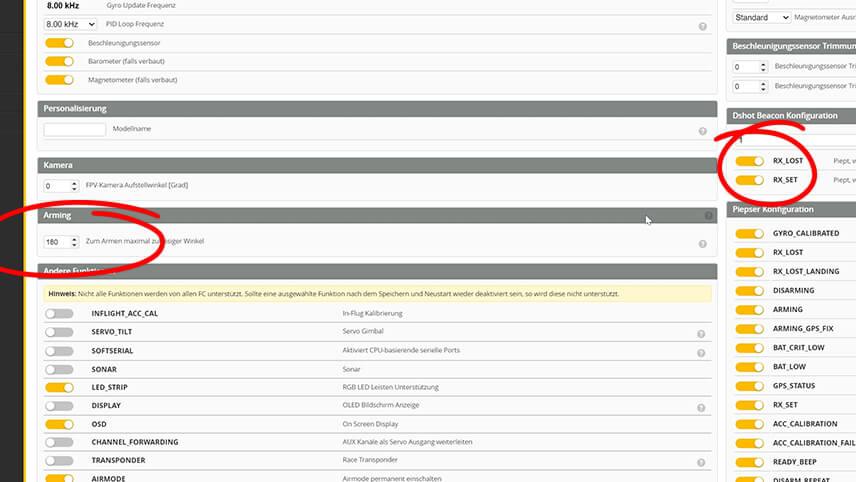
Stel in de basisconfiguratie de arming angle in op 180° zodat de drone in elke richting kan opstijgen. Activeer RX_LOST en RX_SET zodat de motoren piepen als de verbinding wordt verbroken. Sla de instellingen op. Selecteer onder "Receiver" CRSF, het ELRS-ontvangerprotocol.
Ga naar de ExpressLRS-configurator. Selecteer de juiste versie en de juiste ontvanger. Maak verbinding en installeer de firmware. Dit kan enkele minuten duren. Als de installatie geslaagd is, kunt u terugschakelen naar Betaflight en de verbinding testen. Beweeg de sticks op de afstandsbediening en controleer of de doorbuigingen zichtbaar zijn in Betaflight.
Schakel over naar de vliegmodi in Betaflight en voeg de modi Pre-Arm, Arm en Angle toe. Wijs de bijbehorende schakelaars toe op uw afstandsbediening door op "Add Range" te klikken en de schakelaars te verplaatsen. Zorg ervoor dat de bereiken correct zijn ingesteld zodat de modi alleen actief zijn als de schakelaars worden omgedraaid. Sla de instellingen op en test of de schakelaars correct worden weergegeven in Betaflight wanneer u ze verplaatst op de afstandsbediening.
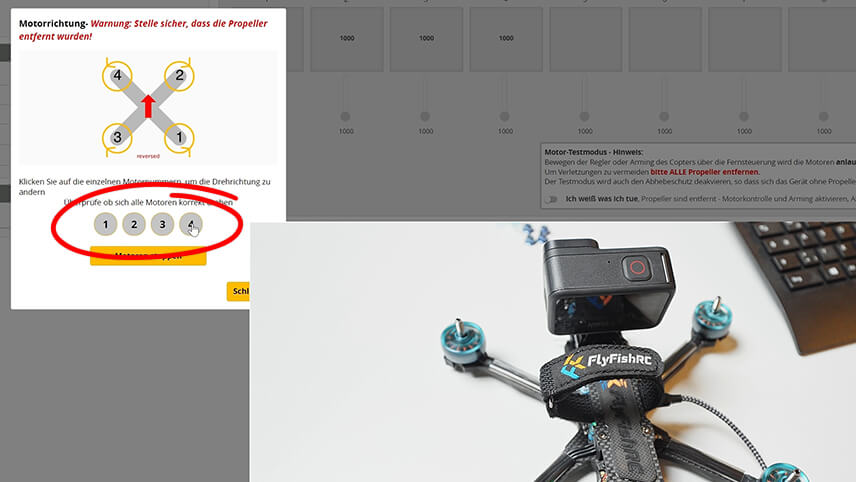
Controleer in het tabblad "Motors" van Betaflight de draairichting van de motoren. Zorg ervoor dat de propellers verwijderd zijn en activeer de schakelaar die de motorbesturing inschakelt. Sluit de batterij aan en vink het vakje "Reverse motors" aan. Omdat we de draairichting van de propellers willen omkeren. Test de draairichting van de motoren en klik op het nummer van de betreffende motor om de draairichting te veranderen als deze niet juist is. Sla de instellingen op en controleer of alle motoren draaien zoals de bedoeling is.
Stel in het OSD (On-Screen Display) de elementen in die in de bril moeten worden weergegeven. Activeer de gemiddelde celspanning, de vliegmodus, timer 1 en 2, evenals de RSSI-waarde en de verbindingskwaliteit. Stel het videoformaat in op HD om de elementen op de juiste plaatsen weer te geven.
Tot slot moeten de goggles en de videozender worden aangesloten. Zet de drone aan en wacht tot de videozender groen knippert. Druk vervolgens op het kleine knopje op de videozender en op de duikbril totdat beide zijn aangesloten.

Monteer tot slot de propellers. Wij gebruiken de blauwe Gemfan Hurricane propellers. Plaats de propellers zo dat ze naar buiten draaien om te voorkomen dat er vuil in de camera terechtkomt. Dit komt overeen met de eerder bepaalde draairichting van de motor. Bevestig de propellers met de bijgeleverde moeren en draai ze vast met het propgereedschap.

Nu ben je klaar voor de eerste testvlucht! Schakel de afstandsbediening in, voorzie de duikbril van stroom en sluit de accu aan op de drone. controleer het geluid van de drone tijdens de vlucht en zorg ervoor dat je geen ongewone trillingen hoort. Houd de accuspanning in de gaten om de accu niet te diep te ontladen. Als alles goed gaat, heb je met succes je eigen FPV drone gebouwd!
Als je meer tips nodig hebt voor je eerste vlucht, bekijk dan onze video. Je vindt alle onderdelen en gereedschappen in onze shop. Veel plezier met vliegen en laat een like en een abonnement achter!