
Az FPV (first-person view) hobbi a drón- és RC-pilótáknak azt a lenyűgöző lehetőséget kínálja, hogy úgy irányítsák repülőgépüket, mintha ők maguk ülnének a pilótafülkében. Ebben központi szerepet játszik a videotechnológia: az eszközre szerelt kamera valós időben továbbítja a képet a pilótának, aki így első személyű perspektívából irányíthatja a repülőgépet. Ez a magával ragadó élmény teszi olyan vonzóvá az FPV repülést, és a pontos irányítás fenntartásához megbízható, stabil videojelre van szükség.
A mai FPV-jelenetben a digitális videorendszerek nagymértékben háttérbe szorították a korábban széles körben használt analóg rendszereket. A digitális FPV rendszerek egyértelmű előnyöket kínálnak, különösen a lényegesen jobb képminőség és a stabil, interferenciamentes átvitel tekintetében. A jól ismert digitális rendszerek, mint például a DJI vagy a Walksnail rendszerei borotvaéles 720p vagy akár 1080p képet szolgáltatnak, és nagyon stabil kapcsolatot tesznek lehetővé nagy távolságokon keresztül. Ezek a digitális rendszerek nem csak a freestyle szektorban bizonyítottak, hanem a nagy hatótávolságú repüléseknél is, ahol a megbízható átvitel kulcsfontosságú.
Mindazonáltal mindig vannak innovatív megközelítések a videó átviteli technológia továbbfejlesztésére az FPV hobbiban. Az egyik ilyen izgalmas fejlesztés az OpenIPC. Az OpenIPC egy nyílt forráskódú firmware, amelyet eredetileg IP-kamerákhoz fejlesztettek ki, és most az FPV-re is alkalmaznak. Bár még fejlesztés alatt áll, és jelenleg nem éri el a kereskedelmi rendszerek teljesítményszintjét, érdekes lehetőséget kínál a hobbi még nyitottabbá tételére.
Az IP-alapú kamerák elméletileg nagy rugalmasságot kínálnak: lehetővé teszik a testreszabást és az egyedi konfigurációkat, amelyek a kereskedelmi rendszerekkel gyakran nem lehetségesek. Emellett az OpenIPC a jövőben költséghatékony alternatívát jelenthet, amelyet a közösség folyamatosan fejleszt. ez hasonló az ExpressLRS (ELRS) vezérlési protokollhoz. A technológia azonban még nem elég érett ahhoz, hogy a legtöbbet hozza ki az FPV-élményből. Különösen az olyan területeken, mint a késleltetés és a stabilitás, még fejlődést kell elérni ahhoz, hogy lépést tartsunk a bevált rendszerekkel.
Mindazonáltal az OpenIPC megmutatja, hogy a nyílt forráskódú projektek hogyan befolyásolhatják az FPV-piacot, és milyen alternatív lehetőségeket teremthetnek a pilóták számára, hogy testre szabhassák és egyénre szabhassák rendszereiket.
Bár az OpenIPC nyílt forráskódú firmware-ként még fejlesztés alatt áll, már van néhány érdekes FPV termék, amely ezzel a szoftverrel kombinálva használható. Különösen két termék keltett feltűnést az FPV közösségben: az EMAX Wyvern Link és a RunCam WiFiLink. Mindkét rendszer az OpenIPC-re épül, ami izgalmas lehetőséggé teszi őket a kísérletező kedvű FPV pilóták számára.
Megjegyzés: Az alább bemutatott rendszerekből jelenleg csak alfa verziók vannak. Ne várjon kiváló minőségű és hibátlan terméket. A gyártók azért dobják piacra ezeket a rendszereket, hogy minél több embernek adjanak lehetőséget az OpenIPC rendszerek továbbfejlesztésére. És nem azért, hogy tökéletes terméket adjanak el.
Az EMAX Wyvern Link egy OpenIPC-kompatibilis digitális videó adó (VTX) és vevő (VRX), amelyet olyan FPV-pilóták számára terveztek, akik megfizethető alternatívát keresnek a saját fejlesztésű digitális FPV-rendszerekkel szemben. A vevő a legerősebb változatban akár 2W maximális átviteli teljesítményt kínál, ami a legerősebb adóval (800mW) kombinálva jelentős hatótávolságot és stabilitást kell, hogy lehetővé tegyen a videótovábbításban. És igen, a vevő digitális rendszerekkel is ad és fordítva. Ezért, ahogy Joshua Bardwell már mondta, a vevőt inkább Groundunitnak, az adót pedig Airunitnek nevezzük.
Eddig az EMAX az egyetlen gyártó az FPV szektorban is, amely négy különböző OpenIPC terméket kínál. Ezek között a fent leírt nagy teljesítményű komponensek mellett olcsóbb termékek is vannak, amelyeket inkább kisebb kopterekhez használnak, amelyeknek kisebb teljesítményre van szükségük az átvitelhez.
A képminőség jelenleg 720p-re (120fps) korlátozódik körülbelül 4 Mbps sebességgel, ami érezhetően alacsonyabb a DJI vagy a Walksnail nagy felbontású rendszereihez képest (25-50 Mbps). Ez gyors mozgású jeleneteknél blokkoláshoz vezet, és csökkenti a kép élességét gyors manővereknél.

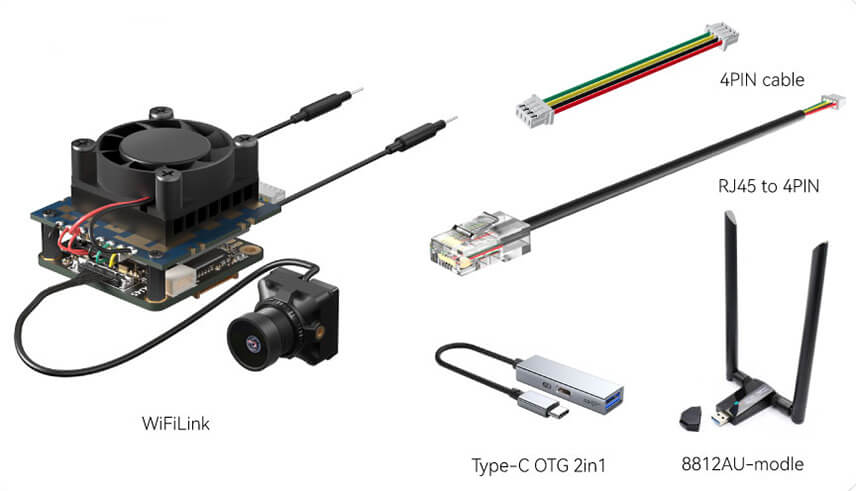
A RunCam WiFiLink egy másik OpenIPC-kompatibilis termék, amely a WiFi alapú videostreaming technológiára támaszkodik. Az átviteli technológiát tekintve nagyon hasonlít az EMAX rendszerhez, de Full HD átvitel lehetőségét is kínálja. Ekkor azonban a képkockasebesség 60 kép/mp-re csökken.
Az EMAX-hoz hasonlóan a rendszer egyelőre nem alkalmas professzionális alkalmazásokhoz, mivel a WiFi alapú megoldások érzékenyebbek a késleltetési problémákra és a jel megszakításaira, mint a hagyományos 5,8 GHz-es vezeték nélküli kapcsolatok.
A RunCam WiFiLink esetében a földi állomás is némileg másképp néz ki, mint az EMAX esetében. A vétel egy "klasszikus" WiFi modullal történik, amely USB OTG-n keresztül csatlakozik egy okostelefonhoz, és lejátssza a fogadott képet.
Összességében az OpenIPC elfogadható, 25 ms körüli késleltetést kínál, ami közel van a DJI FPV V1-hez. Azoknak a pilótáknak, akik a technológián túl többet szeretnének kísérletezni, az EMAX és a RunCam kínál ilyen ígéretes platformokat, de ezek jelenleg nem működnek olyan stabilan, mint a bevált rendszerek.
Az OpenIPC fejlesztésének segítése érdekében a közösség többféle módon is bekapcsolódhat:
A felhasználók telepíthetik az OpenIPC-t kompatibilis eszközökre, és alaposan tesztelhetik azt. A firmware optimalizálásához elengedhetetlen a hibákra, teljesítményingadozásokra vagy potenciális javításokra vonatkozó visszajelzés. Az ilyen visszajelzések közvetlenül megoszthatók olyan platformokon, mint a GitHub vagy speciális FPV fórumok.
Bárki, aki rendelkezik programozási tapasztalattal (különösen C, C++ vagy Python nyelven), aktívan hozzájárulhat a kód javításához. Az OpenIPC egy nyílt forráskódú projekt, amely nyilvánosan elérhető a GitHubon. A fejlesztők új funkciókat adhatnak hozzá, kijavíthatják a meglévő hibákat és javíthatják a dokumentációt.
A pénzügyi hozzájárulással történő támogatás segít az OpenIPC csapatának a fejlesztés előrehaladásában, a hardvertesztek elvégzésében és a szerverköltségek fedezésében.
A fórumokon, közösségi hálózatokon és Discord-csoportokban való részvétel segít a tudás terjesztésében és a többi felhasználó támogatásában a telepítés és a használat során. Ez a fajta közösségi karbantartás elengedhetetlen a növekvő felhasználói közösség létrehozásához.
Összefoglalva, izgatottan várjuk, hogy hová vezet az OpenIPC rendszerek útja az FPV világában. Milyen termékek lesznek, mely gyártók ugranak fel a szekérre, és mennyire lesznek versenyképesek az OpenIPC termékek az olyan bevált rendszerekhez képest, mint a DJI vagy a Walksnail. Talán a termékek hamarosan elérhetőek lesznek a boltunkban.
Források: OpenIPC, Oscar Liang, Joshua Bardwell, RunCam, EMAX











