Nyt år, ny konstruktion! I denne artikel viser vi dig, hvordan du samler en 5-tommer HD FPV-drone til filmoptagelser og freestyle, og hvad du skal bruge til det.
Alle de anvendte dele er naturligvis tilgængelige i vores butik, og det hjælper os enormt, hvis du kigger forbi. Vi takker for hjælpen!
Dette blogindlæg er også tilgængeligt som video. Bare klik på play ovenfor, eller kig på vores YouTube-kanal.
Vi skal bruge flere vigtige komponenter til at bygge vores FPV-drone. De grundlæggende byggesten er rammen, som udgør dronens struktur, og modtageren, som modtager styresignalerne. Fire motorer driver propellerne, mens videosenderen og kameraet sender live-billedet til FPV-brillerne. Flight controlleren, dronens "hjerne", og controlleren, som styrer strømforsyningen til motorerne, er også nødvendige.
Du skal bruge disse komponenter for at bygge en FPV-drone:

Til at modtage videobilledet anbefaler vi Walksnail Avatar Goggles X, som er en af de mest populære HD FPV-briller. Til fjernbetjeningen bruger vi Jumper T20 V2. Det er ikke så vigtigt, hvilken radio du bruger. Den skal dog understøtte ELRS-transmissionsprotokollen. Det anvendte batteri er et 6S LiPo-batteri fra kinesiske Hobbyline, da vi bygger en 6S-kompatibel kopter.
Dette er det udstyr, vi brugte:
Du skal også bruge et udvalg af værktøj til byggeriet. En loddekolbe er vigtig, helst en ordentlig loddestation, samt loddetin. En lighter eller varmepistol kan bruges til at krympe krympeflexen. Kabelbindere er praktiske til forskellige formål, ligesom afisoleringstang til større kabler, sideskærere og små nåletænger til mindre kabler. Du skal bruge et propelværktøj til at montere propellerne. Det vigtigste værktøj er allerede inkluderet i den praktiske Ethix-værktøjskasse.
Et nyttigt værktøj for enhver FPV-pilot:
Nu, hvor vi har fået det af vejen, er det tid til at bygge FPV-dronen.
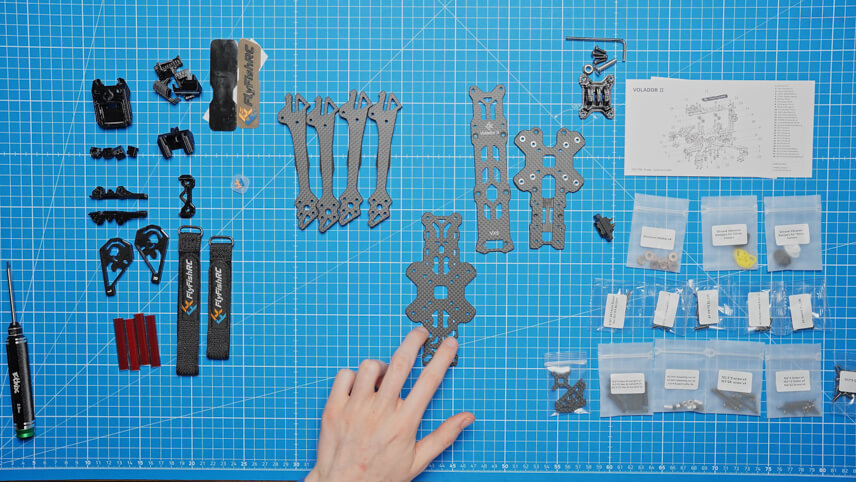
Lad os starte med at samle rammen. Først skal du pakke alle delene ud for at få et godt overblik. Læg rammens fire arme ud, så de danner et kryds i midten. Et lille plusstykke hjælper med at fastgøre armene i midten, hvilket gør det lettere at skrue dem sammen senere. Tryk dette plusstykke godt ind i midten, så armene ligger tæt sammen.
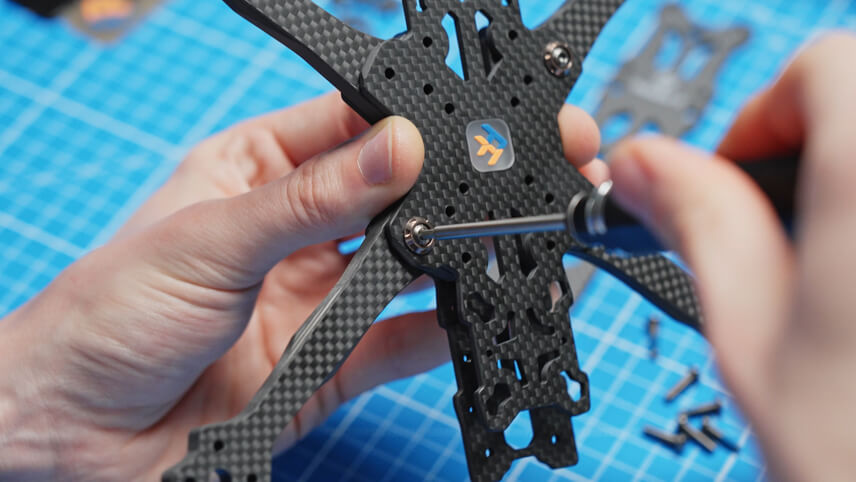
Du skal bruge M3x12-skruer til at fastgøre armene. Vend helikopteren om, og sørg for, at FlyFish-logoet er placeret korrekt. Brug aluminiumsskiver til at fastgøre armene. Brug først de yderste huller og derefter de længere M3x28-skruer til de inderste huller. Lad disse skruer være løse, indtil alle skruerne er monteret, og spænd dem derefter.
Så snart alle skruerne er spændt, kommer de første 3D-printede TPU-dele i spil. Først skal du montere et antennebeslag bagpå. Brug M2x12-skruer og en 1,5 mm sekskantet skruetrækker til at skrue beslaget fast i rammen nedefra. Igen skal du lade alt være løst og først stramme til sidst.
Dernæst monterer vi kameraholderen. Den består af to kulstofplader, to aluminiumsdele og en lille TPU-læbe. Tryk først kulstofpladerne ind i rammen. Sæt derefter aluminiumsdelene fast på kulstofpladerne, men skru dem kun løst på, så kameraet stadig passer mellem dem.

Nu er det tid til standoffs, afstandsstykkerne til de forskellige niveauer i rammen. Der er forskellige størrelser: store, lidt mindre og meget små til GPS-holderen. Først fastgøres de store afstandsstykker til rammen ovenfra med M3x16-skruer. To placeres i midten af rammen og yderligere to på bagsiden. De mindre afstandsstykker, som du sætter fast med M2,5x9-skruer, skal sidde på bagsiden.
Nu forbereder vi motorerne. Vi bruger iFlight Xing2 2306-motorer med 1755 KV. Tryk først TPU-armbeskytterne fast på rammens arme for at beskytte kulstoffet og motorerne. Tag derefter en motor, hold den fast på armen, og spænd langsomt de første skruer. Sørg for, at motoren sidder lige på armen, så gevindet ikke bliver beskadiget. Du skal også sørge for, at skruerne ikke rører motorviklingerne. Gentag dette trin for alle fire motorer.

Nu er det flight controllerens og ESC'ens tur. Tag først alt ud af emballagen: XT60-stikket, skruerne, reservekablerne og silikonedæmperne. Controlleren, også kendt som ESC, er den chip, som alle motorerne er forbundet med. Flight controlleren er dronens "hjerne", som alle komponenter senere forbindes til.
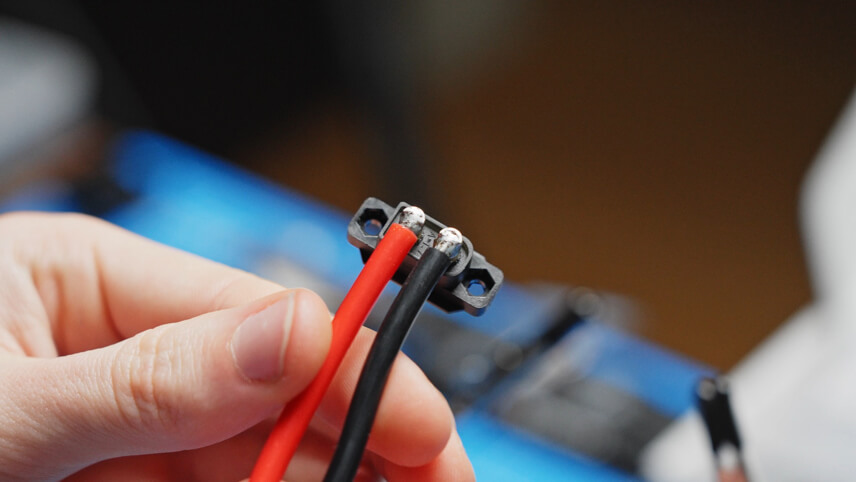
For at forbinde kablerne i XT60-stikket i en vinkel på 90° lodder vi først kontakterne på stikket. Vi bruger i øvrigt det XT60-stik, der fulgte med rammen.
Kablerne er også fortinnede. Lod derefter kablerne til kontakterne på XT60-stikket. Sørg for, at intet rører hinanden mellem de to kontakter.
Kondensatoren placeres i rammen nedefra med plus loddet til plus og minus til minus. Vi var nødt til at købe en mindre kondensator (størrelsesmæssigt), da den fra ESC'en ikke passer ind i rammen.
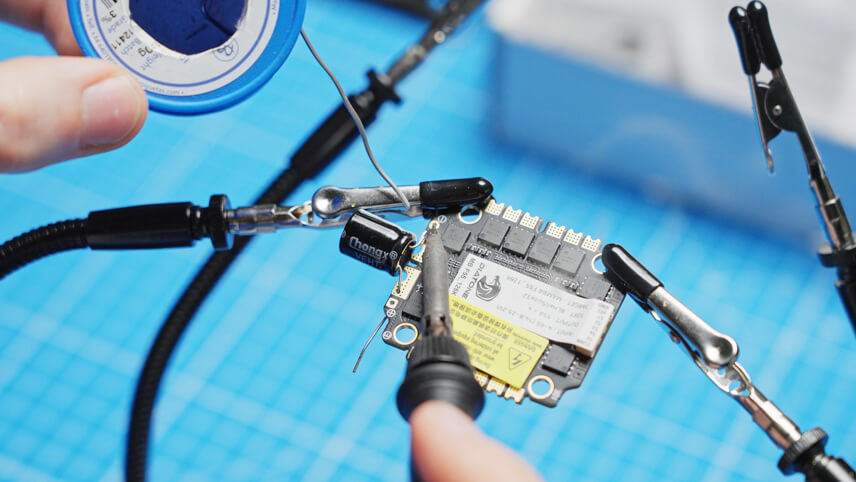
Skær de fremspringende ben af kondensatoren. Derefter kan du forberede loddepunkterne til strømkablerne på ESC'en og også lodde strømkablerne.
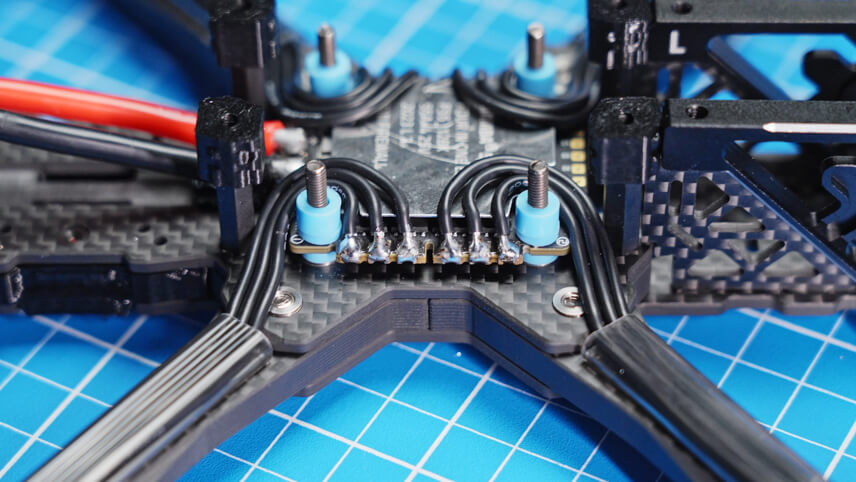
Nu monterer vi ESC'en i rammen. Det gør du ved at trække silikonedæmperne gennem hullerne i rammen. De tre forbindelser pr. motor er loddet på forhånd. Sæt derefter motorkabelbeskytterne på, og skub kablerne gennem disse beskyttere, før du lodder dem til ESC'en. Det er vigtigt, at kablerne ikke rører hinanden, men kun forbindes til den respektive loddeplade.
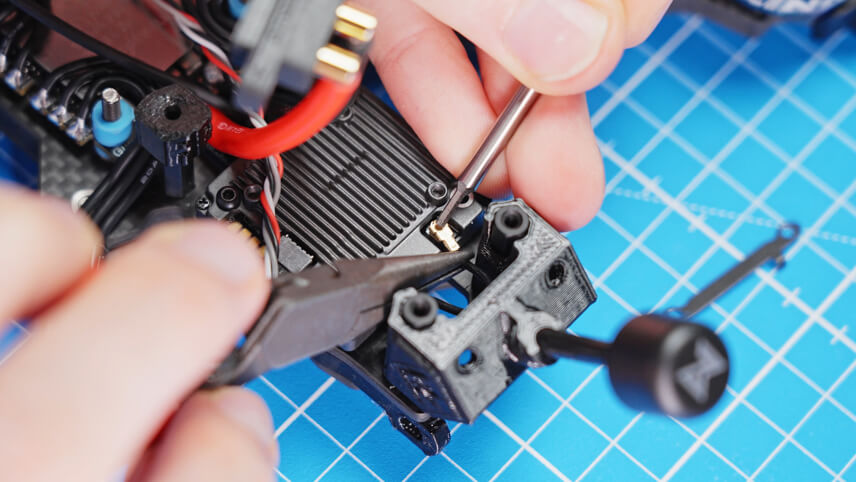
Det næste er videosendersystemet. Vi bruger Walksnail Avatar HD Kit V2, som består af antenne, videosender og kamera. Videosenderen monteres bag på rammen og kameraet foran. Kablerne lægges, så videosenderen kan placeres korrekt. Brug de medfølgende skruer og spændeskiver til at skrue videosenderen på plads.
Fjern dækpladen på videosenderen, så U.FL-forbindelsen kommer til syne. Sæt antennen fast på beslaget, og tilslut antennen til videosenderen. Sæt pladen på igen, og spænd skruerne.
For at forbinde videosenderen med flight controlleren skal du lodde det røde kabel til 9V-pad'en, det sorte kabel til GND-pad'en, det grå TX-kabel til RX3-pad'en og det hvide RX-kabel til TX3-pad'en på flight controlleren. Sørg for, at RX og TX er tilsluttet korrekt for at sikre problemfri kommunikation. Det nøjagtige diagram findes i instruktionerne til FC og videosenderen.
Videosenderen er nu færdigmonteret, og XT60-stikket kan trykkes fast på afstandsstykkerne på bagsiden.
Sæt silikonedæmperne ind i siden af flight controlleren, og tilslut controller-kablet til flight controlleren. Monter flight controlleren i rammen, og fastgør den med de medfølgende møtrikker.
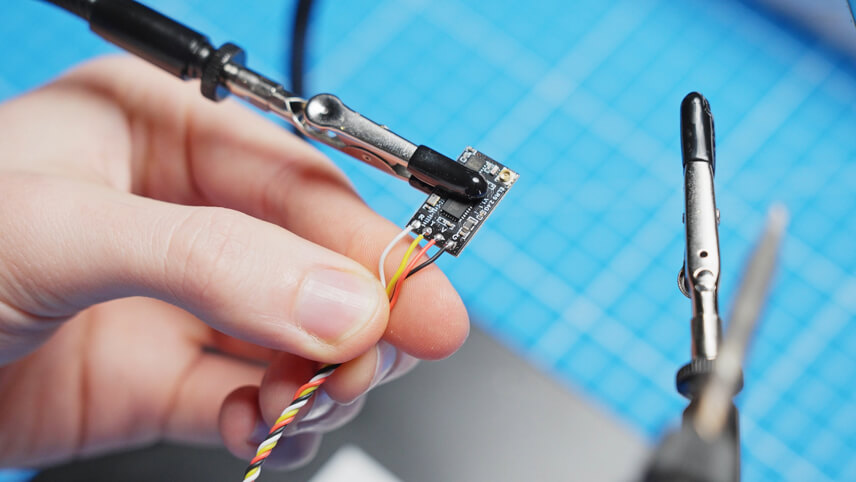
Nu er modtageren installeret. Vi bruger en ELRS-modtager, som tilsluttes på samme måde som videosenderen. Se vejledningen for at finde den korrekte placering af forbindelserne. Normalt er forbindelserne GND (sort), 5V (rød), TX (grå) og RX (hvid). Disse kabler loddes til UART1-tilslutningen på flight controlleren: TX til RX, RX til TX, 5V til 5V og GND til GND. Krympeflexen beskytter både printet og kablerne. Monter modtageren bag kameraet ved at trække antennen ind under kameraet og fastgøre det hele med kabelbindere. Alternativt kan du bruge dobbeltklæbende tape.
Næste trin er at montere toppladen. Der bruges forskellige skruer til dette: M2,5-skruer bagpå, forsænkede skruer i midten og skruer med et bredere hoved til GoPro-holderen foran. Disse specielle skruer forhindrer, at TPU'en rives ud i tilfælde af et fald. Stram alle skruerne, men overdriv ikke for at undgå skader. Monter også batteripuden ved at justere den korrekt og trykke den ned for at forhindre, at batteriet glider.
Før vi går videre til softwarekonfigurationen, skal vi teste elektronikken. Sæt en røgprop mellem batteriet og dronen for at opdage eventuelle fejltilslutninger uden at beskadige komponenterne. Når alle lysdioder på modtageren, flight controlleren og videosenderen lyser, er du klar til konfiguration.

For at konfigurere helikopteren skal du bruge to programmer på din computer: ExpressLRS-konfiguratoren til modtageren og Betaflight-konfiguratoren til flight controlleren.
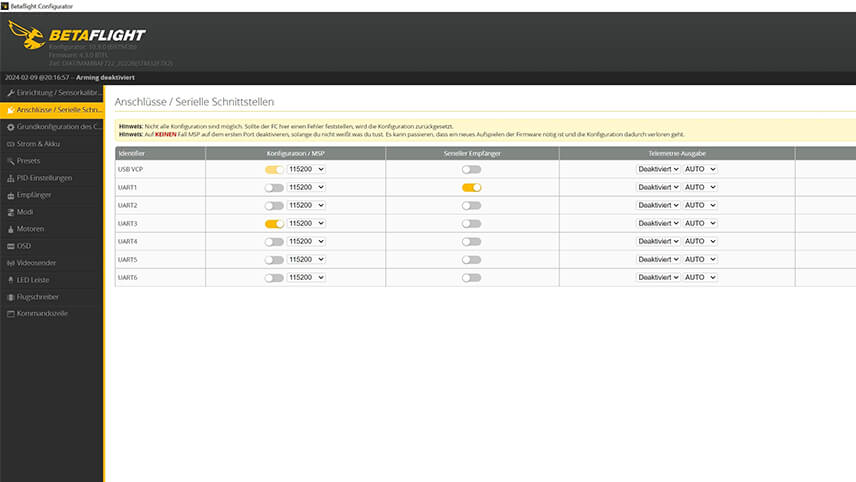
Start med Betaflight. Opret forbindelse til flight controlleren, og sørg for, at modtageren er indstillet til UART1 og videosenderen til UART3. Aktivér de tilsvarende forbindelser, og gem konfigurationen.
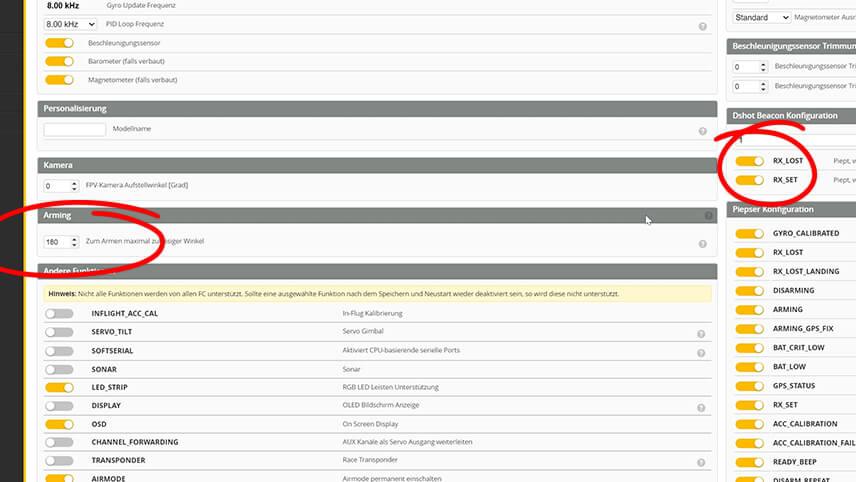
I den grundlæggende konfiguration skal du indstille armeringsvinklen til 180°, så dronen kan lette i alle retninger. Aktivér RX_LOST og RX_SET, så motorerne bipper, hvis forbindelsen går tabt. Gem indstillingerne. Under "Receiver" vælges CRSF, ELRS-modtagerprotokollen.
Skift til ExpressLRS-konfiguratoren. Vælg den korrekte version og den passende modtager. Opret forbindelse, og installer firmwaren. Det kan tage et par minutter. Hvis installationen var vellykket, kan du skifte tilbage til Betaflight og teste forbindelsen. Bevæg pindene på fjernbetjeningen, og tjek, om udbøjningerne er synlige i Betaflight.
Skift til flyvetilstandene i Betaflight, og tilføj tilstandene Pre-Arm, Arm og Angle. Tildel de tilsvarende kontakter på din fjernbetjening ved at klikke på "Add Range" og flytte kontakterne. Sørg for, at områderne er indstillet korrekt, så tilstandene kun er aktive, når kontakterne vendes. Gem indstillingerne, og test, om kontakterne vises korrekt i Betaflight, når du flytter dem på fjernbetjeningen.
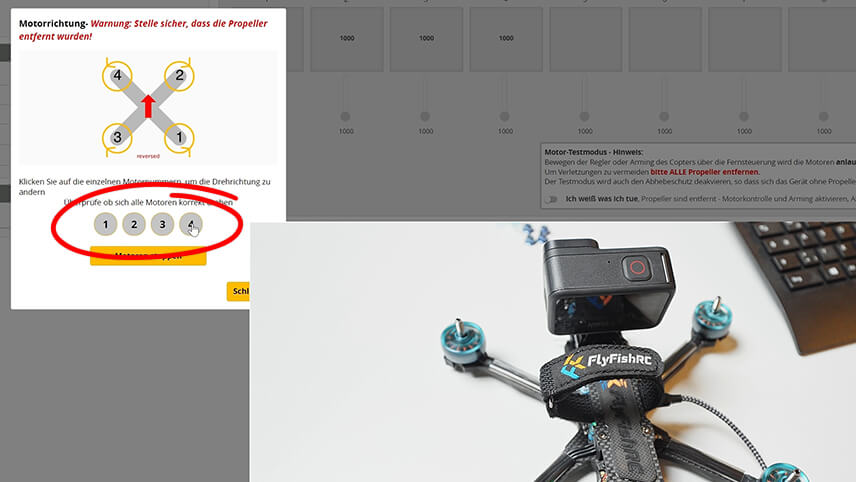
Kontroller motorernes rotationsretning under fanen "Motors" i Betaflight. Sørg for, at propellerne er fjernet, og aktiver kontakten, der aktiverer motorstyringen. Tilslut batteriet, og sæt kryds i afkrydsningsfeltet "Reverse motors". Fordi vi vil have propellerne ud af rotationsretningen. Test motorernes rotationsretning, og klik på nummeret på den respektive motor for at ændre rotationsretningen, hvis den ikke er korrekt. Gem indstillingerne, og sørg for, at alle motorer roterer efter hensigten.
I OSD (On-Screen Display) skal du indstille de elementer, der skal vises i brillerne. Aktivér den gennemsnitlige cellespænding, flytilstand, timer 1 og 2 samt RSSI-værdien og forbindelseskvaliteten. Indstil videoformatet til HD for at vise elementerne på de rigtige steder.
Til sidst skal brillerne og videosenderen tilsluttes. Tænd for dronen, og vent, indtil videosenderen blinker grønt. Tryk derefter på den lille knap på videosenderen og på brillerne, indtil begge er tilsluttet.

Til sidst skal du montere propellerne. Vi bruger Gemfan Hurricane-propeller i blå. Anbring propellerne, så de drejer udad for at undgå at kaste snavs ind i kameraet. Dette svarer til den tidligere fastlagte motorrotationsretning. Sæt propellerne fast med de medfølgende møtrikker, og stram dem med propelværktøjet.

Nu er du klar til den første testflyvning! Tænd for fjernbetjeningen, sæt strøm til brillerne, og tilslut batteriet til dronen. tjek lyden af dronen under flyvning, og sørg for, at du ikke hører nogen usædvanlige vibrationer. Hold øje med batterispændingen, så du ikke aflader batteriet for dybt. Hvis alt går godt, har du bygget din egen FPV-drone med succes!
Hvis du har brug for flere tips til din første flyvning, kan du se vores video. Du kan finde alle dele og værktøjer i vores butik. Hav det sjovt med at flyve, og giv os gerne et like og et abonnement!