
FPV-hobbyn (first-person view) erbjuder drönar- och RC-piloter den fascinerande möjligheten att styra sina flygplan som om de själva satt i cockpit. Videotekniken spelar en central roll i detta: en kamera som är monterad på enheten överför bilden till piloten i realtid, vilket gör det möjligt för dem att styra flygplanet ur ett förstapersonsperspektiv. Den här uppslukande upplevelsen är det som gör FPV-flygning så tilltalande och kräver en pålitlig, stabil videosignal för att upprätthålla exakt kontroll.
I dagens FPV-scen har digitala videosystem kraftigt överskuggat de analoga system som en gång i tiden användes i stor utsträckning. Digitala FPV-system erbjuder klara fördelar, särskilt när det gäller betydligt högre bildkvalitet och stabil, störningsresistent överföring. Välkända digitala system, t.ex. från DJI eller Walksnail, levererar knivskarpa bilder i 720p eller till och med 1080p och möjliggör en mycket stabil anslutning över långa avstånd. Dessa digitala system har inte bara visat sig fungera inom freestyle-sektorn, utan även för långdistansflygningar, där tillförlitlig överföring är avgörande.
Det finns dock alltid innovativa sätt att vidareutveckla tekniken för videoöverföring inom FPV-hobbyn. En av dessa spännande utvecklingar är OpenIPC. OpenIPC är en firmware med öppen källkod som ursprungligen utvecklades för IP-kameror och som nu används för FPV. Även om det fortfarande är under utveckling och för närvarande inte uppnår samma prestandanivå som kommersiella system, erbjuder det en intressant möjlighet att göra hobbyn ännu mer öppen.
IP-baserade kameror erbjuder i teorin stor flexibilitet: de tillåter anpassning och individuella konfigurationer som ofta inte är möjliga med kommersiella system. Dessutom kan OpenIPC i framtiden vara ett kostnadseffektivt alternativ som kontinuerligt förbättras av samhället. detta liknar kontrollprotokollet för ExpressLRS (ELRS). Tekniken är dock ännu inte tillräckligt mogen för att man ska kunna få ut mesta möjliga av FPV-upplevelsen. Framför allt inom områden som latens och stabilitet krävs det fortfarande framsteg för att hålla jämna steg med etablerade system.
OpenIPC visar ändå potentialen i hur projekt med öppen källkod kan påverka FPV-marknaden och skapa alternativa sätt för piloter att anpassa och individualisera sina system.
Även om OpenIPC fortfarande är under utveckling som firmware med öppen källkod finns det redan några intressanta FPV-produkter som kan användas i kombination med denna programvara. Två produkter har särskilt väckt uppståndelse i FPV-communityn: EMAX Wyvern Link och RunCam WiFiLink. Båda systemen är baserade på OpenIPC, vilket gör dem till spännande alternativ för FPV-piloter som är intresserade av att experimentera.
Obs: Det finns för närvarande endast alfaversioner av de system som presenteras nedan. Du bör inte förvänta dig en högkvalitativ och felfri produkt. Tillverkarna släpper ut dessa system på marknaden för att ge fler människor möjlighet att vidareutveckla OpenIPC-system. Och inte för att sälja en perfekt produkt.
EMAX Wyvern Link är en OpenIPC-kompatibel digital videosändare (VTX) och mottagare (VRX) avsedd för FPV-piloter som söker ett prisvärt alternativ till proprietära digitala FPV-system. Mottagaren erbjuder en maximal sändningseffekt på upp till 2W i den starkaste versionen, vilket i kombination med den starkaste sändaren (800mW) bör möjliggöra en betydande räckvidd och stabilitet i videoflödet. Och ja, mottagaren sänder också med digitala system och vice versa. Det är därför, som Joshua Bardwell redan har sagt, vi föredrar att kalla mottagaren Groundunit och sändaren Airunit.
Hittills är EMAX också den enda tillverkaren inom FPV-sektorn som kan erbjuda fyra olika OpenIPC-produkter. Förutom de högpresterande komponenterna som beskrivs ovan ingår även billigare produkter som sannolikt kommer att användas för mindre helikoptrar som kräver mindre effekt för överföring.
Bildkvaliteten är för närvarande begränsad till 720p (120fps) vid ca 4 Mbps, vilket är märkbart lägre jämfört med de högupplösta systemen från DJI eller Walksnail (25-50 Mbps). Detta leder till blockering i snabba scener och minskar bildens skärpa under snabba manövrer.

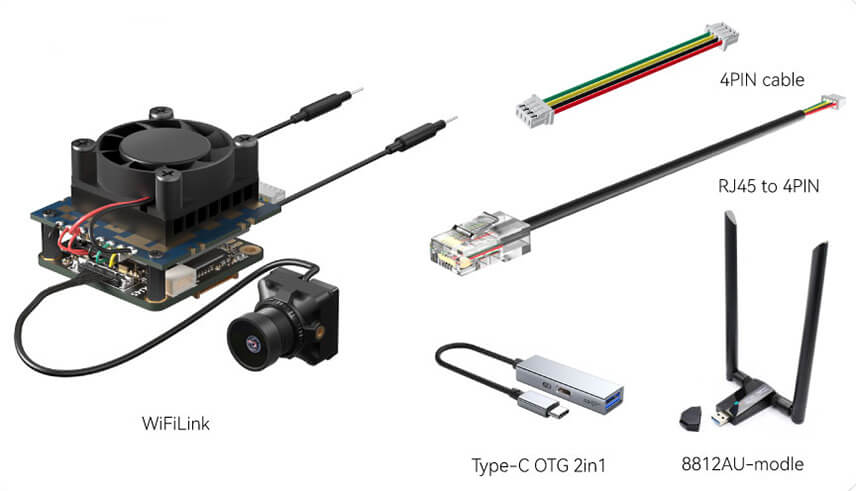
RunCam WiFiLink är en annan OpenIPC-kompatibel produkt som förlitar sig på WiFi-baserad videostreamingteknik. När det gäller överföringstekniken är den mycket lik EMAX-systemet, men erbjuder också möjlighet till Full HD-överföring. Bildhastigheten reduceras dock till 60 bilder per sekund.
Precis som med EMAX är systemet ännu inte lämpligt för professionella tillämpningar, eftersom WiFi-baserade lösningar är mer känsliga för latensproblem och signalavbrott jämfört med traditionella trådlösa 5,8 GHz-anslutningar.
Med RunCam WiFiLink ser markstationen också lite annorlunda ut än med EMAX. Mottagningen sker via en "klassisk" WiFi-modul, som ansluts till en smartphone via USB OTG och spelar upp den mottagna bilden.
Sammantaget erbjuder OpenIPC en acceptabel latens på cirka 25 ms, vilket är nära DJI FPV V1. För piloter som vill experimentera mer med tekniken erbjuder EMAX och RunCam lovande plattformar, men de har för närvarande inte samma stabilitetsnivå som de etablerade systemen.
För att hjälpa till med utvecklingen av OpenIPC finns det olika sätt som samhället kan engagera sig på:
Användare kan installera OpenIPC på kompatibla enheter och testa det i stor utsträckning. Återkoppling om buggar, prestandafluktuationer eller potentiella förbättringar är avgörande för att optimera den inbyggda programvaran. Sådan feedback kan delas direkt på plattformar som GitHub eller särskilda FPV-forum.
Alla som har erfarenhet av programmering (särskilt i C, C++ eller Python) kan aktivt bidra till att förbättra koden. OpenIPC är ett projekt med öppen källkod som är offentligt tillgängligt på GitHub. Utvecklare kan lägga till nya funktioner, åtgärda befintliga buggar och förbättra dokumentationen.
Stöd genom ekonomiska bidrag hjälper OpenIPC-teamet att driva utvecklingen framåt, utföra hårdvarutester och täcka serverkostnader.
Deltagande i forum, sociala nätverk och Discord-grupper bidrar till att sprida kunskap och stödja andra användare under installation och användning. Denna typ av underhåll av gemenskapen är avgörande för att skapa en växande användargemenskap.
Sammanfattningsvis är vi glada över att se vart resan med OpenIPC-system i FPV-världen kommer att ta oss. Vilka produkter det kommer att finnas, vilka tillverkare som kommer att hoppa på tåget och hur konkurrenskraftiga OpenIPC-produkter kommer att vara jämfört med etablerade system som DJI eller Walksnail. Kanske kommer produkter snart att finnas tillgängliga i vår butik.
Källor: OpenIPC, Oscar Liang, Joshua Bardwell, RunCam, EMAX











