Nytt år, nytt bygge! I den här artikeln visar vi dig hur du monterar en 5-tums HD FPV-drönare för filmklipp och freestyle och vad du behöver för det.
Alla delar som används finns naturligtvis tillgängliga i vår butik och det hjälper oss enormt om du tittar förbi. Tack så mycket!
Det här blogginlägget finns även som video. Klicka bara på play ovan eller ta en titt på vår YouTube-kanal.
Vi behöver flera viktiga komponenter för att bygga vår FPV-drönare. Till de grundläggande byggstenarna hör ramen, som utgör drönarens struktur, och mottagaren, som tar emot styrsignalerna. Fyra motorer driver propellrarna, medan videosändaren och kameran sänder live-bilden till FPV-glasögonen. Flygkontrollen, drönarens "hjärna", och styrenheten, som kontrollerar strömförsörjningen till motorerna, är också nödvändiga.
Du behöver dessa komponenter för att bygga en FPV-drönare:

För att ta emot videobilden rekommenderar vi Walksnail Avatar Goggles X, en av de mest populära HD FPV-glasögonen. För fjärrkontrollen använder vi Jumper T20 V2. Vilken radio du använder exakt är inte så viktigt. Den måste dock stödja ELRS-överföringsprotokollet. Batteriet som används är ett 6S LiPo-batteri från China Hobbyline, eftersom vi bygger en 6S-kompatibel kopter.
Detta är utrustningen vi använde:
Du kommer också att behöva ett urval av verktyg för bygget. En lödkolv är nödvändig, helst en ordentlig lödstation, samt lödtenn. En tändare eller värmepistol kan användas för att krympa krympslangen. Kabelbuntar är praktiska för olika tillämpningar, liksom avbitartång för större kablar, sidavbitare och små nåltänger för mindre kablar. Du behöver ett propellerverktyg för att montera propellrarna. Det viktigaste verktyget ingår redan i det praktiska Ethix-verktygsfodralet.
Ett användbart verktyg för alla FPV-piloter:
Nu när vi har fått det ur vägen är det dags att bygga FPV-drönaren.
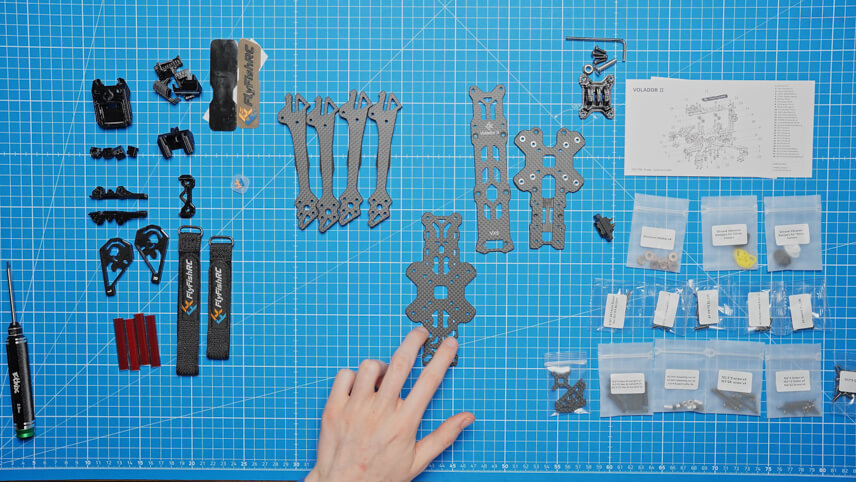
Låt oss börja med att montera ramen. Packa först upp alla delar för att få en bra överblick. Lägg ut ramens fyra armar så att de bildar ett kors i mitten. En liten plusdel hjälper till att fixera armarna i mitten, vilket gör det lättare att skruva ihop dem senare. Tryck fast plusdelen ordentligt i mitten så att armarna ligger tätt ihop.
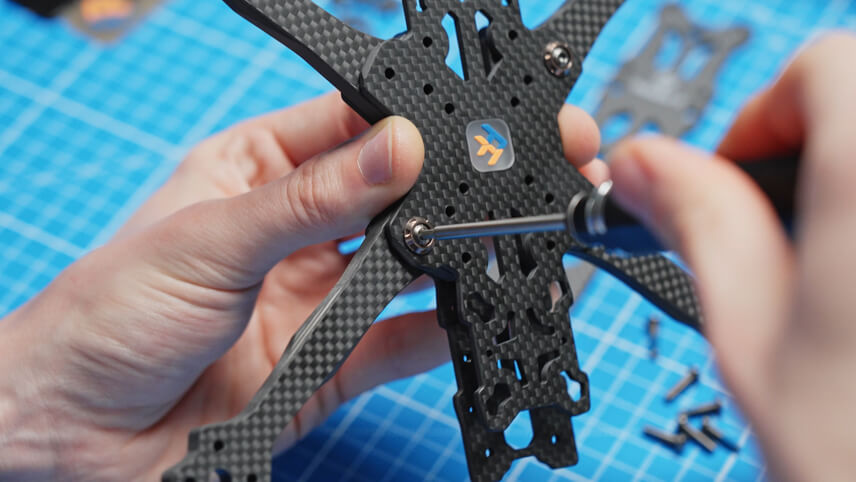
Du behöver M3x12-skruvar för att fästa armarna. Vänd på helikoptern och kontrollera att FlyFish-logotypen är rätt placerad. Använd aluminiumbrickor för att fästa armarna. Använd först de yttre hålen och sedan de längre M3x28-skruvarna för de inre hålen. Låt dessa skruvar vara lösa tills alla skruvar är monterade och dra sedan åt dem.
Så snart alla skruvar är åtdragna kommer de första 3D-utskrivna TPU-delarna till användning. Montera först ett antennfäste på baksidan. Använd M2x12-skruvar och en 1,5 mm sexkantsskruvmejsel för att skruva fast fästet i ramen underifrån. Återigen, lämna allt löst och dra åt först i slutet.
Därefter monterar vi kamerafästet. Detta består av två kolfiberplattor, två aluminiumdelar och en liten TPU-läpp. Tryck först in kolfiberplattorna i ramen. Fäst sedan aluminiumdelarna på kolfiberplattorna, men skruva bara fast dem löst så att kameran fortfarande får plats mellan dem.

Nu är det dags för standoffs, distanserna för de olika nivåerna på ramen. Det finns olika storlekar: stora, lite mindre och mycket små för GPS-fästet. Fäst först de stora distanserna på ramen uppifrån med M3x16-skruvar. Två placeras i mitten av ramen och ytterligare två på baksidan. De mindre distanserna, som du fäster med M2,5x9-skruvar, sitter på baksidan.
Nu förbereder vi motorerna. Vi använder iFlight Xing2 2306-motorer med 1755 KV. Tryck först fast TPU-armskydden på ramens armar för att skydda kolfibern och motorerna. Ta sedan en motor, håll den mot armen och dra långsamt åt de första skruvarna. Se till att motorn sitter rakt på armen så att gängan inte skadas. Du bör också se till att skruvarna inte vidrör motorlindningarna. Upprepa detta steg för alla fyra motorerna.

Nu är det dags för flygledaren och ESC:n. Ta först ut allt ur förpackningen: XT60-kontakten, skruvarna, reservkablarna och silikondämparna. Styrenheten, även kallad ESC, är det chip som alla motorer är anslutna till. Flygledaren är drönarens "hjärna", som alla komponenter senare ansluts till.
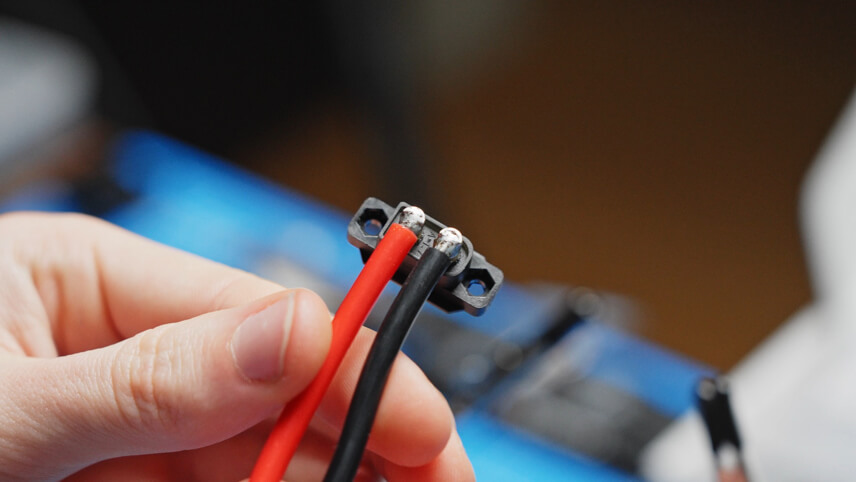
För att ansluta kablarna i XT60-kontakten i 90° vinkel förlöder vi först kontakterna i kontakten. För övrigt använder vi den XT60-kontakt som följde med ramen.
Kablarna är också förtennade. Löd sedan fast kablarna i kontakterna på XT60-kontakten. Se till att inget rör sig mellan de två kontakterna.
Kondensatorn placeras i ramen underifrån, med plus fastlödd på plus och minus på minus. Vi var tvungna att ta en mindre kondensator (storleksmässigt) eftersom den från ESC:n inte fick plats i ramen.
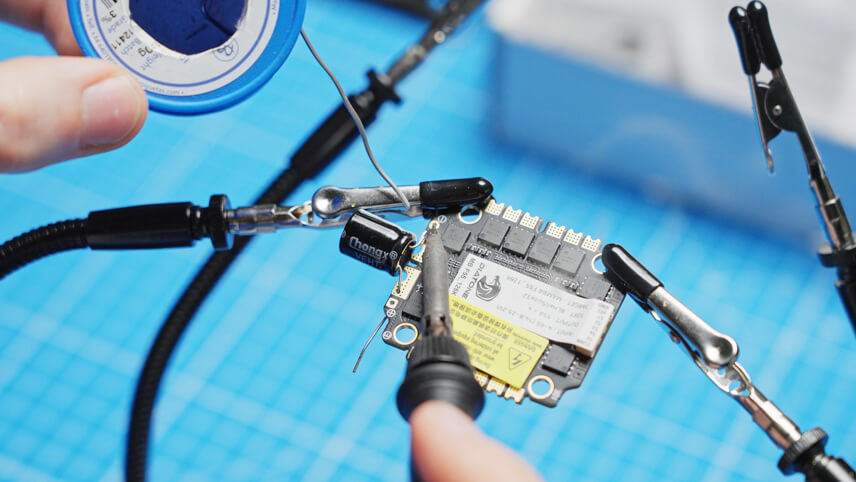
Klipp av de utstickande benen på kondensatorn. Därefter kan du förbereda lödpunkterna för strömkablarna på ESC:n och löda fast strömkablarna.
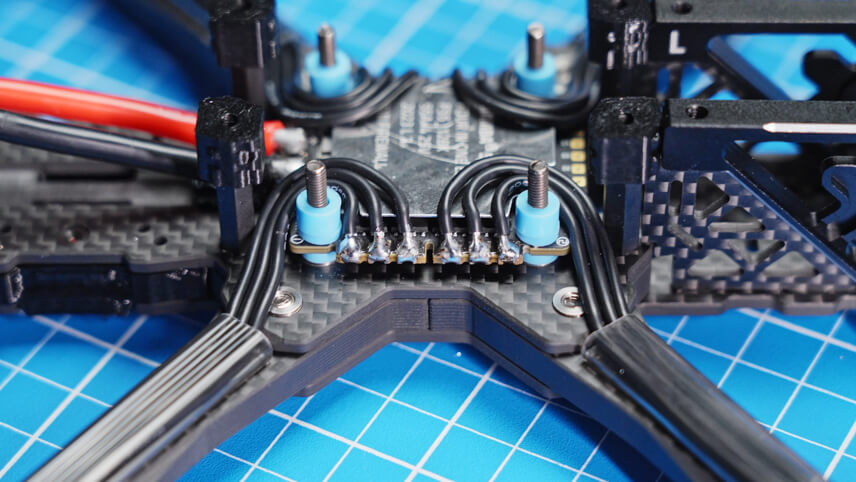
Nu monterar vi ESC:n i ramen. För att göra detta drar du silikondämparna genom hålen i ramen. De tre anslutningarna per motor är förlödda. Fäst sedan motorkabelskydden och för in kablarna genom dessa skydd innan du löder fast dem i ESC:n. Det är viktigt att kablarna inte vidrör varandra utan endast ansluts till respektive lödplatta.
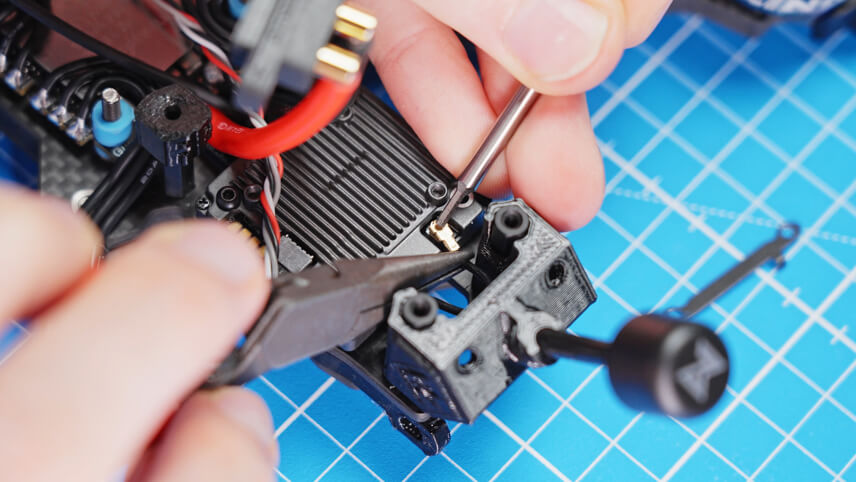
Nästa steg är videosändarsystemet. Vi använder Walksnail Avatar HD Kit V2, som består av antenn, videosändare och kamera. Videosändaren monteras på baksidan av ramen och kameran på framsidan. Kablarna är dragna så att videosändaren kan placeras på rätt sätt. Använd de medföljande skruvarna och brickorna för att skruva fast videosändaren.
Ta bort täckplåten på videosändaren så att U.FL-anslutningen kommer fram. Fäst antennen i fästet och anslut antennen till videosändaren. Sätt tillbaka plattan och dra åt skruvarna.
För att ansluta videosändaren till flygledaren, löd den röda kabeln till 9V-polen, den svarta kabeln till GND-polen, den grå TX-kabeln till RX3-polen och den vita RX-kabeln till TX3-polen på flygledaren. Se till att RX och TX är korrekt anslutna för att säkerställa en smidig kommunikation. Det exakta diagrammet finns i instruktionerna för FC och videosändaren.
Videosändaren är nu helt installerad och XT60-anslutningen kan tryckas fast på distanshållarna på baksidan.
För in silikondämparna på sidan av flightcontrollern och anslut controllerkabeln till flightcontrollern. Montera styrenheten i ramen och säkra den med de medföljande muttrarna.
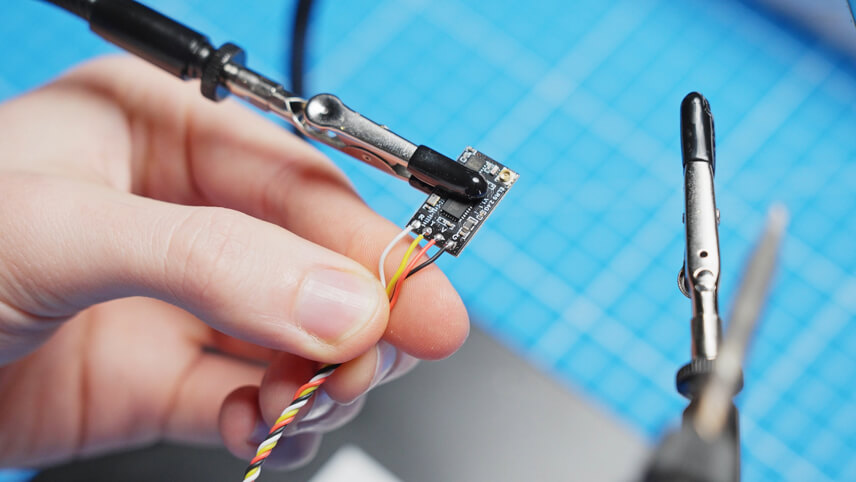
Nu ska mottagaren installeras. Vi använder en ELRS-mottagare, som ansluts på samma sätt som videosändaren. Se instruktionerna för att hitta rätt placering av anslutningarna. Normalt är anslutningarna GND (svart), 5V (röd), TX (grå) och RX (vit). Dessa kablar löds fast i UART1-anslutningen på flight controllern: TX till RX, RX till TX, 5V till 5V och GND till GND. Krympslangen skyddar både kretskortet och kablarna. Montera mottagaren bakom kameran genom att dra antennen under kameran och säkra allt med buntband. Alternativt kan du använda dubbelhäftande tejp.
Nästa steg är att montera topplattan. För detta används olika skruvar: M2,5-skruvar på baksidan, försänkta skruvar i mitten och skruvar med ett bredare huvud för GoPro-fästet på framsidan. Dessa specialskruvar förhindrar att TPU:n slits ut vid ett eventuellt fall. Dra åt alla skruvar, men överdriv inte för att undvika skador. Montera även batteridynan genom att rikta in den korrekt och trycka ner den för att förhindra att batteriet glider.
Innan vi går vidare till programvarukonfigurationen ska vi testa elektroniken. Anslut en rökpropp mellan batteriet och drönaren för att upptäcka eventuella felkopplingar utan att skada komponenterna. När alla lysdioder på mottagaren, styrenheten och videosändaren tänds är du redo för konfigurering.

För att konfigurera helikoptern behöver du två program på din dator: ExpressLRS-konfiguratorn för mottagaren och Betaflight-konfiguratorn för flygledaren.
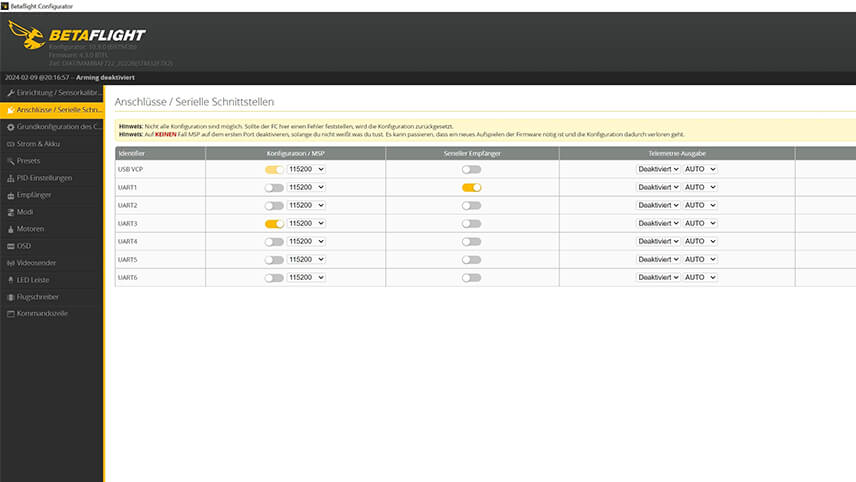
Börja med Betaflight. Anslut till flygledaren och kontrollera att mottagaren är inställd på UART1 och videosändaren på UART3. Aktivera motsvarande anslutningar och spara konfigurationen.
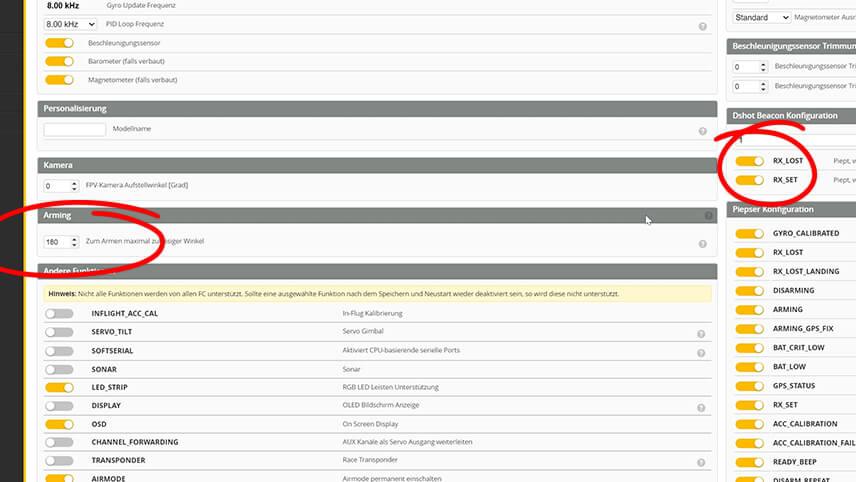
I grundkonfigurationen ställer du in armeringsvinkeln till 180° så att drönaren kan lyfta i alla riktningar. Aktivera RX_LOST och RX_SET så att motorerna piper om anslutningen bryts. Spara inställningarna. Under "Receiver" väljer du CRSF, ELRS-mottagarprotokollet.
Byt till ExpressLRS-konfiguratorn. Välj rätt version och lämplig mottagare. Anslut och installera firmware. Detta kan ta några minuter. Om installationen var framgångsrik kan du växla tillbaka till Betaflight och testa anslutningen. Flytta spakarna på fjärrkontrollen och kontrollera om utslagen syns i Betaflight.
Växla till flyglägena i Betaflight och lägg till lägena Pre-Arm, Arm och Angle. Tilldela motsvarande omkopplare på din fjärrkontroll genom att klicka på "Add Range" och flytta omkopplarna. Se till att intervallen är korrekt inställda så att lägena endast är aktiva när brytarna vrids om. Spara inställningarna och testa om omkopplarna visas korrekt i Betaflight när du flyttar dem på fjärrkontrollen.
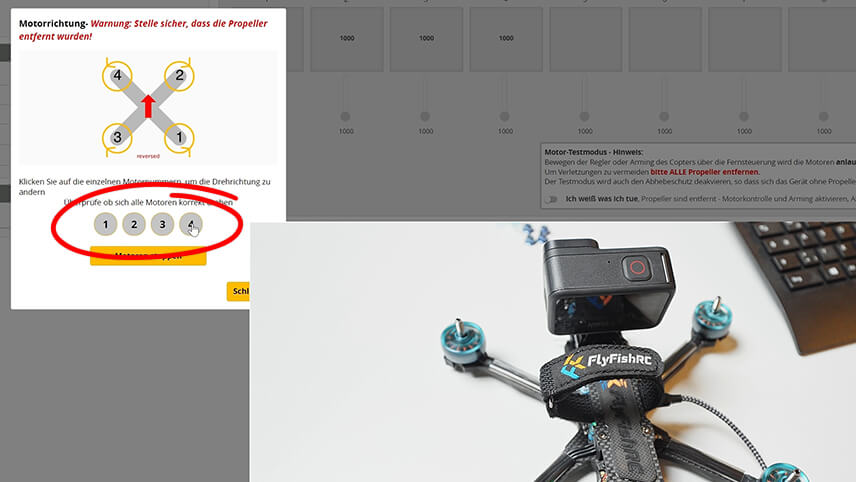
Kontrollera motorernas rotationsriktning på fliken "Motors" i Betaflight. Se till att propellrarna är borttagna och aktivera strömbrytaren som aktiverar motorstyrningen. Anslut batteriet och kryssa i rutan "Reverse motors". Eftersom vi vill ha propellrarna ur rotationsriktningen. Testa motorernas rotationsriktning och klicka på numret för respektive motor för att ändra rotationsriktningen om den inte är korrekt. Spara inställningarna och kontrollera att alla motorer roterar som avsett.
I OSD (On-Screen Display) ställer du in de element som ska visas i glasögonen. Aktivera genomsnittlig cellspänning, flygläge, timer 1 och 2 samt RSSI-värde och anslutningskvalitet. Ställ in videoformatet på HD för att visa elementen på rätt plats.
Slutligen måste skyddsglasögonen och videosändaren anslutas. Slå på drönaren och vänta tills videosändaren blinkar grönt. Tryck sedan på den lilla knappen på videosändaren och på skyddsglasögonen tills båda är anslutna.

Slutligen monterar du propellrarna. Vi använder Gemfan Hurricane propellrar i blått. Placera propellrarna så att de vänder utåt för att undvika att smuts slungas in i kameran. Detta motsvarar den tidigare bestämda rotationsriktningen för motorn. Fäst propellrarna med de medföljande muttrarna och dra åt dem med propellerverktyget.

Nu är du redo för den första provflygningen! Slå på fjärrkontrollen, strömförsörj skyddsglasögonen och anslut batteriet till drönaren. kontrollera ljudet från drönaren under flygning och se till att du inte hör några ovanliga vibrationer. Håll ett öga på batterispänningen så att batteriet inte laddas ur för djupt. Om allt går bra har du lyckats bygga din egen FPV-drönare!
Om du behöver fler tips inför din första flygning kan du titta på vår video. Du hittar alla delar och verktyg i vår butik. Ha kul med att flyga och lämna oss gärna en gilla-markering och en prenumeration!