Yeni yıl, yeni yapı! Bu makalede, sinematik çekimler ve serbest stil için 5 inçlik bir HD FPV drone'u nasıl monte edeceğinizi ve bunun için neye ihtiyacınız olduğunu göstereceğiz.
Kullanılan tüm parçalar elbette mağazamızda mevcuttur ve uğramanız bize çok yardımcı olur. Teşekkür ederiz!
Bu blog yazısı video olarak da mevcuttur. Yukarıdaki oynat düğmesine tıklayın veya YouTube kanalımıza bir göz atın.
FPV drone'umuzu oluşturmak için birkaç önemli bileşene ihtiyacımız var. Temel yapı taşları arasında dronun yapısını oluşturan çerçeve ve kontrol sinyallerini alan alıcı bulunmaktadır. Dört motor pervaneleri çalıştırırken, video vericisi ve kamera canlı görüntüyü FPV gözlüklerine iletir. Drone'un "beyni" olan uçuş kontrolörü ve motorlara giden güç kaynağını kontrol eden kontrolör de gereklidir.
Bir FPV drone oluşturmak için bu bileşenlere ihtiyacınız var:

Video görüntüsünü almak için, en popüler HD FPV gözlüklerinden biri olan Walksnail Avatar Goggles X'i öneriyoruz. Uzaktan kumanda için Jumper T20 V2 kullanıyoruz. Tam olarak hangi radyoyu kullandığınız çok önemli değil. Ancak ELRS iletim protokolünü desteklemesi gerekiyor. Kullanılan pil, 6S uyumlu bir helikopter inşa ettiğimiz için Çin Hobbyline'dan bir 6S LiPo pil.
Kullandığımız ekipmanlar bunlar:
Ayrıca yapı için çeşitli aletlere de ihtiyacınız olacak. Bir havya, tercihen uygun bir lehimleme istasyonu ve lehim gereklidir. Isıyla daralan boruları daraltmak için bir çakmak veya ısı tabancası kullanılabilir. Kablo bağları, daha büyük kablolar için tel sıyırıcılar, yan kesiciler ve daha küçük kablolar için küçük kargaburun penseler gibi çeşitli uygulamalar için pratiktir. Pervaneleri takmak için bir pervane aletine ihtiyacınız olacaktır. En önemli alet, pratik Ethix alet çantasına zaten dahil edilmiştir.
Her FPV pilotu için faydalı bir araç:
Bunu da aradan çıkardığımıza göre, sıra FPV drone'u inşa etmeye geldi.
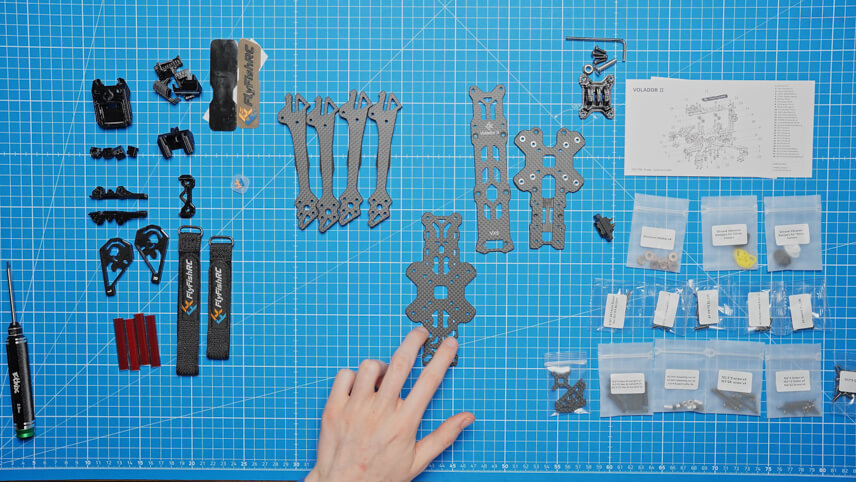
Çerçeveyi monte ederek başlayalım. İlk olarak, iyi bir genel bakış elde etmek için tüm parçaları paketinden çıkarın. Çerçevenin dört kolunu ortada bir haç oluşturacak şekilde yerleştirin. Küçük bir artı parça, kolları merkezde sabitlemeye yardımcı olarak daha sonra vidalamayı kolaylaştırır. Kollar birbirine yakın olacak şekilde bu artı parçayı merkeze doğru sıkıca bastırın.
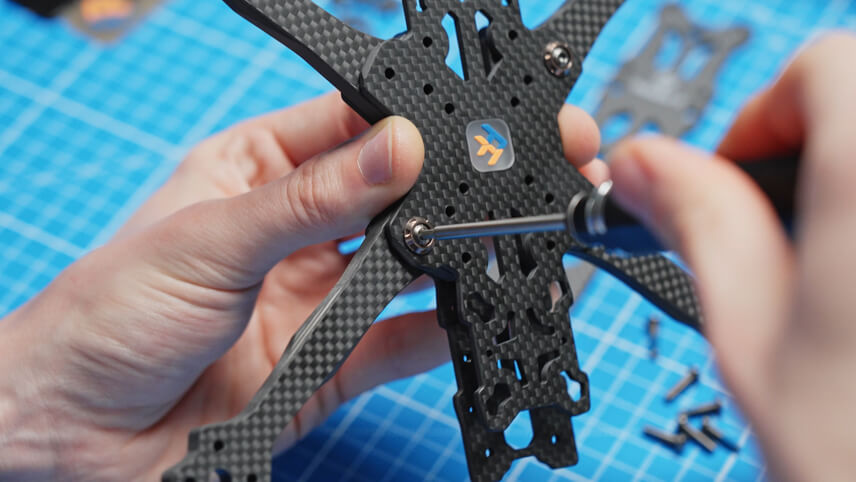
Kolları takmak için M3x12 vidalara ihtiyacınız olacak. Helikopteri ters çevirin ve FlyFish logosunun doğru şekilde konumlandırıldığından emin olun. Kolları takmak için alüminyum pullar kullanın. Önce dış delikleri, ardından iç delikler için daha uzun M3x28 vidaları kullanın. Tüm vidalar takılana kadar bu vidaları gevşek bırakın, daha sonra sıkın.
Tüm vidalar sıkılır sıkılmaz, ilk 3D baskılı TPU parçaları devreye girer. İlk olarak, arkaya bir anten braketi monte edin. Braketi alttan çerçeveye vidalamak için M2x12 vidalar ve 1,5 mm altıgen tornavida kullanın. Yine, her şeyi gevşek bırakın ve sadece sonunda sıkın.
Ardından, kamera yuvasını monte ediyoruz. Bu, iki karbon plaka, iki alüminyum parça ve küçük bir TPU dudaktan oluşur. Önce karbon plakaları çerçeveye bastırın. Ardından alüminyum parçaları karbon plakalara takın, ancak kameranın hala aralarına sığması için sadece gevşek bir şekilde vidalayın.

Şimdi sıra, çerçevenin farklı seviyeleri için ara parçalar olan standoff'lara geldi. Farklı boyutlar vardır: GPS montajı için büyük, biraz daha küçük ve çok küçük. İlk olarak, M3x16 vidaları kullanarak büyük standoffları çerçeveye yukarıdan takın. İki tanesi çerçevenin ortasına ve iki tanesi de arka tarafa yerleştirilir. M2.5x9 vidalarla taktığınız daha küçük standoff'lar arkaya gider.
Şimdi motorları hazırlıyoruz. Biz 1755 KV ile iFlight Xing2 2306 motorları kullanıyoruz. Önce karbonu ve motorları korumak için TPU kol koruyucularını çerçevenin kollarına bastırın. Ardından bir motor alın, kola tutun ve ilk vidaları yavaşça sıkın. Dişin zarar görmemesi için motorun kola düz oturduğundan emin olun. Ayrıca vidaların motor sargılarına temas etmediğinden de emin olmalısınız. Bu adımı dört motor için de tekrarlayın.

Şimdi sıra uçuş kontrolöründe ve ESC'de. Önce her şeyi ambalajından çıkarın: XT60 konektörü, vidalar, yedek kablolar ve silikon damperler. ESC olarak da bilinen kontrolör, tüm motorların bağlı olduğu çiptir. Uçuş kontrolörü, daha sonra tüm bileşenlerin bağlandığı drone'un "beynidir".
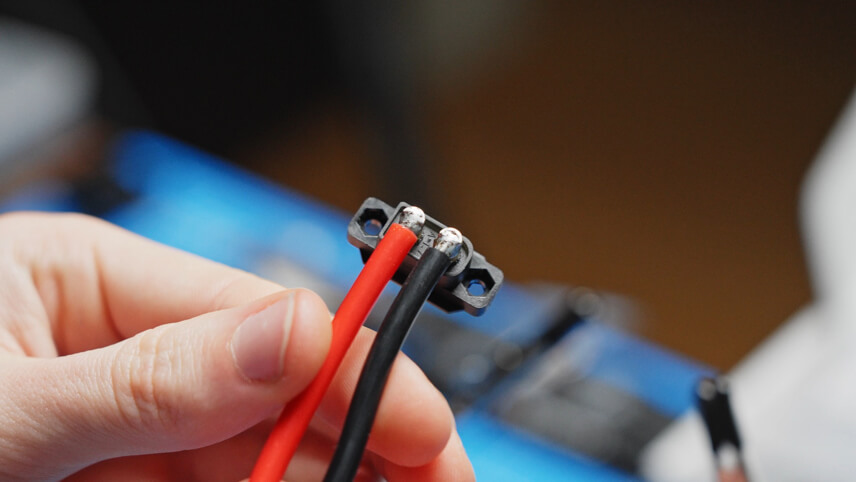
XT60 konektörünün kablolarını 90° açıyla bağlamak için önce konektörün kontaklarını önceden lehimliyoruz. Bu arada, çerçeveyle birlikte gelen XT60 konektörünü kullanıyoruz.
Kablolar da önceden kalaylanmıştır. Ardından kabloları XT60 konnektörünün kontaklarına lehimleyin. İki kontak arasına hiçbir şeyin değmediğinden emin olun.
Kondansatör çerçeveye alttan yerleştirilir, artı artıya ve eksi eksiye lehimlenir. ESC'den gelen kondansatör çerçeveye sığmadığı için daha küçük bir kondansatör (boyut olarak) almak zorunda kaldık.
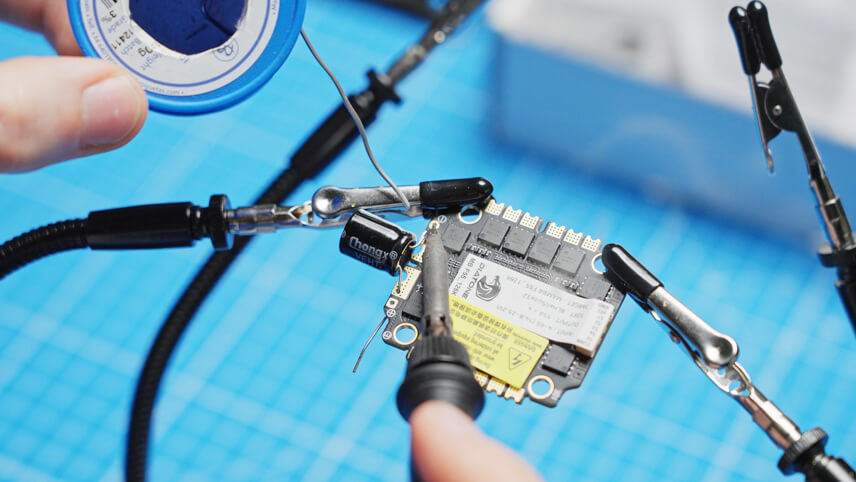
Kondansatörün çıkıntılı bacaklarını kesin. Daha sonra ESC üzerindeki güç kabloları için lehim noktalarını hazırlayabilir ve güç kablolarını da lehimleyebilirsiniz.
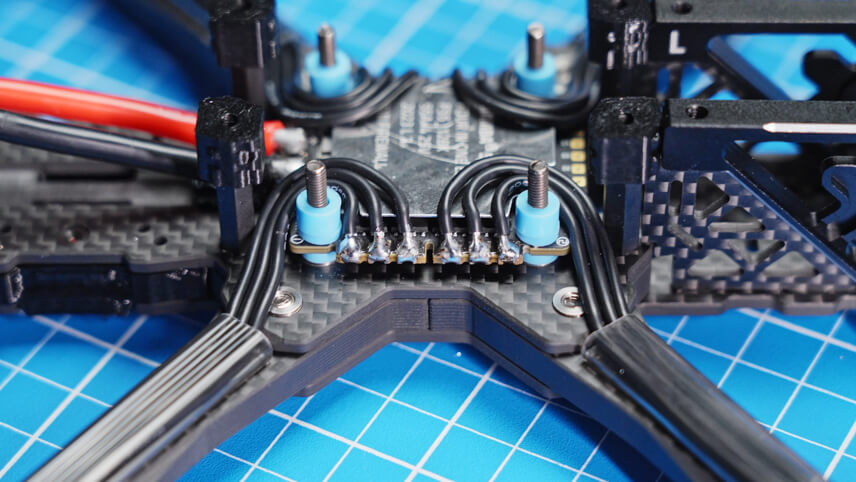
Şimdi ESC'yi çerçeveye monte ediyoruz. Bunu yapmak için, silikon damperleri çerçevedeki deliklerden çekin. Motor başına üç bağlantı önceden lehimlenmiştir. Ardından motor kablo koruyucularını takın ve kabloları ESC'ye lehimlemeden önce bu koruyuculardan geçirin. Kabloların birbirine temas etmemesi ve sadece ilgili lehim pedine bağlanması önemlidir.
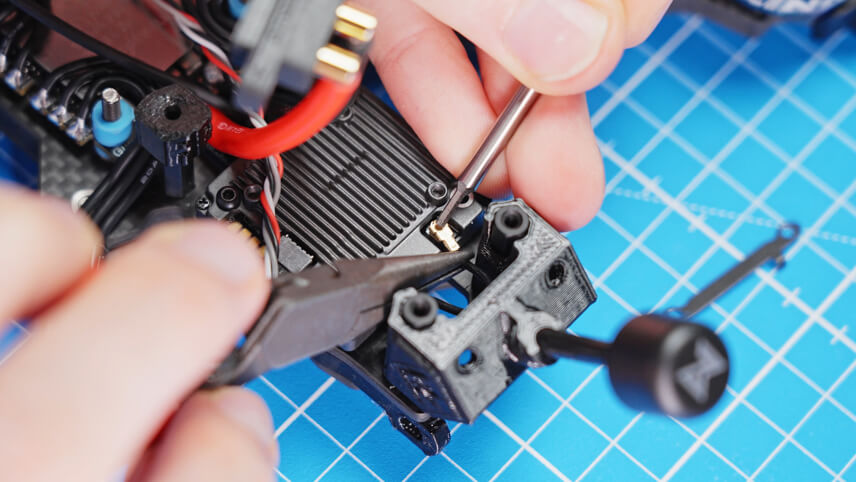
Sırada video verici sistemi var. Anten, video vericisi ve kameradan oluşan Walksnail Avatar HD Kit V2'yi kullanıyoruz. Video vericisi çerçevenin arka tarafına, kamera ise ön tarafına monte ediliyor. Kablolar, video vericisinin doğru şekilde konumlandırılabilmesi için döşenmiştir. Video vericisini yerine vidalamak için verilen vidaları ve pulları kullanın.
U.FL bağlantısını ortaya çıkarmak için video vericisinin kapak plakasını çıkarın. Anteni brakete takın ve anteni video vericisine bağlayın. Plakayı tekrar takın ve vidaları sıkın.
Video vericisini uçuş kontrol cihazına bağlamak için kırmızı kabloyu 9V pedine, siyah kabloyu GND pedine, gri TX kablosunu RX3 pedine ve beyaz RX kablosunu uçuş kontrol cihazının TX3 pedine lehimleyin. Sorunsuz iletişim sağlamak için RX ve TX'in doğru bağlandığından emin olun. Tam şema FC ve video vericisi talimatlarında bulunabilir.
Video vericisi artık tamamen takılmıştır ve XT60 konektörü arkadaki dikmelere bastırılabilir.
Silikon damperleri uçuş kumandasının yan tarafına yerleştirin ve kumanda kablosunu uçuş kumandasına bağlayın. Uçuş kontrol cihazını çerçeveye monte edin ve verilen somunlarla sabitleyin.
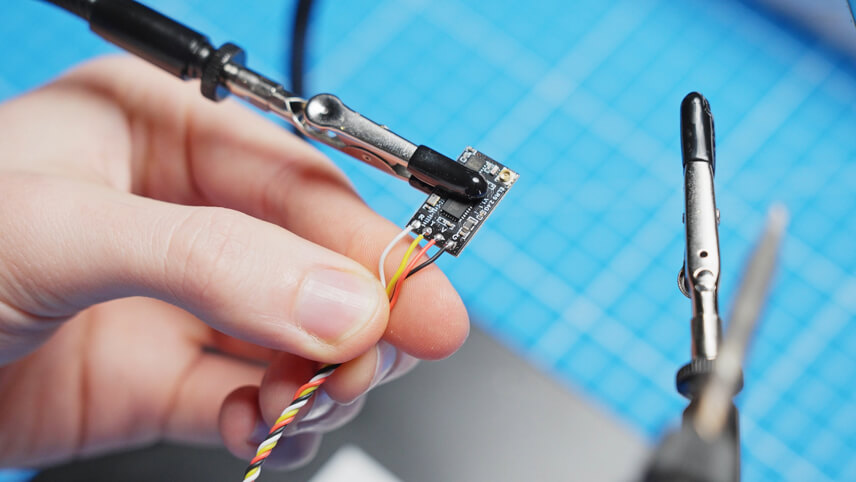
Şimdi alıcı kuruluyor. Video vericisine benzer şekilde bağlanan bir ELRS alıcısı kullanıyoruz. Bağlantıların doğru atamasını bulmak için talimatlara bakın. Normalde bağlantılar GND (siyah), 5V (kırmızı), TX (gri) ve RX (beyaz) şeklindedir. Bu kablolar uçuş kontrol cihazının UART1 bağlantısına lehimlenir: TX'ten RX'e, RX'ten TX'e, 5V'tan 5V'a ve GND'den GND'ye. Büzüşmeli boru hem kartı hem de kabloları korur. Anteni kameranın altına çekerek ve her şeyi kablo bağlarıyla sabitleyerek alıcıyı kameranın arkasına monte edin. Alternatif olarak, çift taraflı yapışkan bant kullanabilirsiniz.
Bir sonraki adım üst plakayı monte etmektir. Bunun için çeşitli vidalar kullanılır: arkada M2.5 vidalar, ortada havşa başlı vidalar ve önde GoPro montajı için daha geniş başlı vidalar. Bu özel vidalar, düşme durumunda TPU'nun yırtılmasını önler. Tüm vidaları sıkın, ancak hasar görmemesi için aşırıya kaçmayın. Ayrıca pil pedini doğru şekilde hizalayarak ve pilin kaymasını önlemek için aşağı bastırarak monte edin.
Yazılım yapılandırmasına geçmeden önce elektronik aksamı test edelim. Bileşenlere zarar vermeden herhangi bir yanlış bağlantıyı tespit etmek için pil ile drone arasına bir duman durdurucu bağlayın. Alıcı, uçuş kontrol cihazı ve video vericisi üzerindeki tüm LED'ler yandığında, yapılandırma için hazırsınız demektir.

Helikopteri kurmak için bilgisayarınızda iki programa ihtiyacınız olacak: alıcı için ExpressLRS konfigüratörü ve uçuş kontrolörü için Betaflight konfigüratörü.
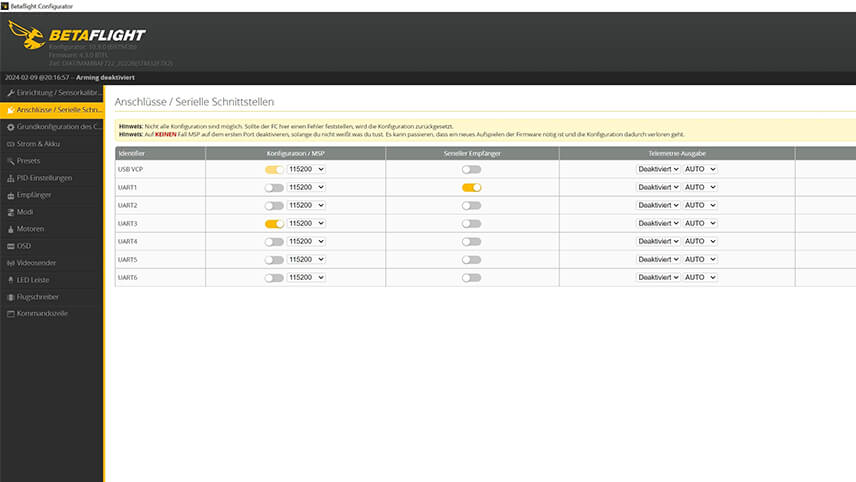
Betaflight ile başlayın. Uçuş kontrol cihazına bağlanın ve alıcının UART1'e ve video vericisinin UART3'e ayarlandığından emin olun. İlgili bağlantıları etkinleştirin ve yapılandırmayı kaydedin.
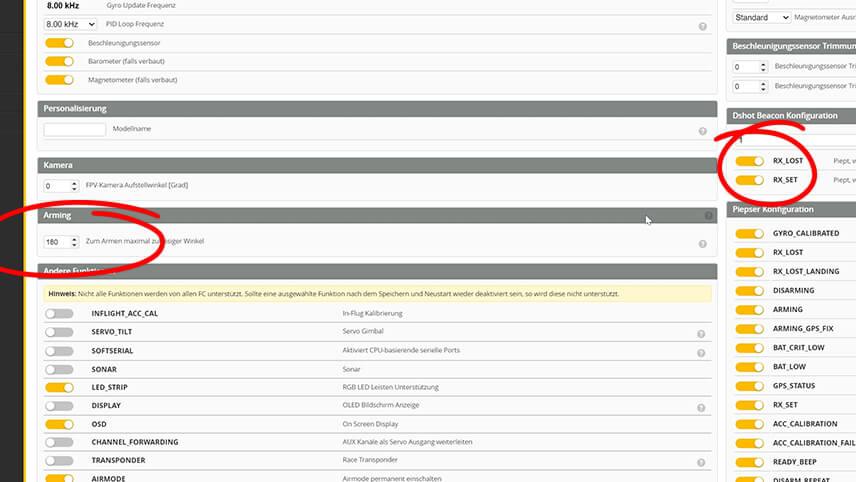
Temel yapılandırmada, dronun herhangi bir yönde kalkış yapabilmesi için kurma açısını 180° olarak ayarlayın. Bağlantı kesildiğinde motorların bip sesi çıkarması için RX_LOST ve RX_SET'i etkinleştirin. Ayarları kaydedin. "Alıcı" altında, ELRS alıcı protokolü olan CRSF'yi seçin.
ExpressLRS konfigüratörüne geçin. Doğru sürümü ve uygun alıcıyı seçin. Bağlanın ve aygıt yazılımını yükleyin. Bu işlem birkaç dakika sürebilir. Kurulum başarılı olduysa, Betaflight'a geri dönebilir ve bağlantıyı test edebilirsiniz. Uzaktan kumanda üzerindeki çubukları hareket ettirin ve sapmaların Betaflight'ta görünüp görünmediğini kontrol edin.
Betaflight'ta uçuş modlarına geçin ve Pre-Arm, Arm ve Angle modlarını ekleyin. "Aralık Ekle "ye tıklayarak ve anahtarları hareket ettirerek uzaktan kumandanızdaki ilgili anahtarları atayın. Modların yalnızca anahtarlar çevrildiğinde etkin olması için aralıkların doğru ayarlandığından emin olun. Ayarları kaydedin ve uzaktan kumanda üzerinde hareket ettirdiğinizde anahtarların Betaflight'ta doğru şekilde görüntülenip görüntülenmediğini test edin.
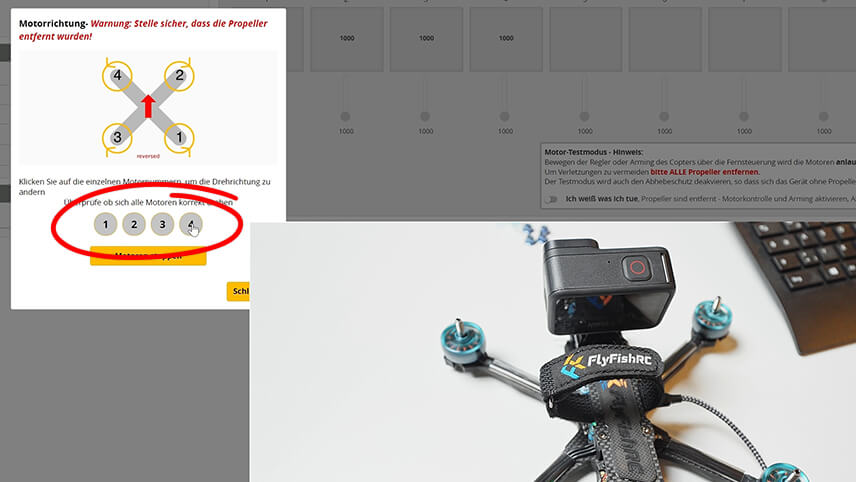
Betaflight'ın "Motorlar" sekmesinde motorların dönüş yönünü kontrol edin. Pervanelerin çıkarıldığından emin olun ve motor kontrolünü etkinleştiren anahtarı etkinleştirin. Bataryayı bağlayın ve "Reverse motors" kutucuğunu işaretleyin. Çünkü pervanelerin dönüş yönünün dışarıda olmasını istiyoruz. Motorların dönüş yönünü test edin ve doğru değilse dönüş yönünü değiştirmek için ilgili motorun numarasına tıklayın. Ayarları kaydedin ve tüm motorların amaçlandığı gibi döndüğünden emin olun.
OSD'de (Ekran Görüntüsü), gözlükte görüntülenecek öğeleri ayarlayın. Ortalama hücre voltajını, uçuş modunu, zamanlayıcı 1 ve 2'yi, ayrıca RSSI değerini ve bağlantı kalitesini etkinleştirin. Öğeleri doğru yerlerde görüntülemek için video formatını HD olarak ayarlayın.
Son olarak, gözlüklerin ve video vericisinin bağlanması gerekir. Drone'u açın ve video vericisi yeşil renkte yanıp sönene kadar bekleyin. Ardından, her ikisi de bağlanana kadar video vericisi ve gözlük üzerindeki küçük düğmeye basın.

Son olarak, pervaneleri monte edin. Biz mavi renkli Gemfan Hurricane pervaneleri kullanıyoruz. Pervaneleri, kameraya kir girmesini önlemek için dışa doğru dönecek şekilde yerleştirin. Bu, daha önce belirlenen motor dönüş yönüne karşılık gelir. Pervaneleri ekteki somunlarla takın ve pervane aleti ile sıkın.

Artık ilk test uçuşu için hazırsınız! Uzaktan kumandayı açın, gözlüklere güç verin ve pili drone'a bağlayın. uçuş sırasında drone'un sesini kontrol edin ve olağandışı titreşimler duymadığınızdan emin olun. Pili çok fazla boşaltmamak için pil voltajına dikkat edin. Her şey yolunda giderse, kendi FPV dronunuzu başarıyla yaptınız demektir!
İlk uçuşunuz için daha fazla ipucuna ihtiyacınız varsa, videomuza bir göz atın. Tüm parçaları ve araçları mağazamızda bulabilirsiniz. Uçarken iyi eğlenceler ve lütfen bize bir beğeni ve abonelik bırakın!