An nou, construcție nouă! În acest articol, vă vom arăta cum să asamblați o dronă FPV HD de 5 inch pentru filmări cinematografice și freestyle și ce aveți nevoie pentru aceasta.
Toate piesele folosite sunt desigur disponibile în magazinul nostru și ne ajută enorm dacă treceți pe la noi. Vă mulțumim!
Această postare pe blog este disponibilă și sub formă de videoclip. Faceți clic pe redarea de mai sus sau aruncați o privire la canalul nostru YouTube.
Avem nevoie de câteva componente importante pentru a construi drona noastră FPV. Componentele de bază includ cadrul, care formează structura dronei, și receptorul, care primește semnalele de control. Patru motoare acționează elicele, în timp ce transmițătorul video și camera transmit imaginea live către ochelarii FPV. Controlerul de zbor, "creierul" dronei, și controlerul, care controlează alimentarea cu energie a motoarelor, sunt, de asemenea, necesare.
Aveți nevoie de aceste componente pentru a construi o dronă FPV:

Pentru a primi imaginea video, recomandăm Walksnail Avatar Goggles X, unul dintre cele mai populare ochelari FPV HD. Pentru telecomandă folosim Jumper T20 V2. Radioul pe care îl folosiți exact nu este atât de important. Cu toate acestea, acesta trebuie să suporte protocolul de transmisie ELRS. Bateria utilizată este o baterie LiPo 6S din China Hobbyline, deoarece construim un copter compatibil cu 6S.
Acesta este echipamentul pe care l-am folosit:
Veți avea nevoie și de o selecție de unelte pentru construcție. Un fier de lipit este esențial, de preferință o stație de lipit adecvată, precum și lipire. O brichetă sau un pistol de căldură pot fi utilizate pentru a contracta tubul termocontractabil. Legăturile de cabluri sunt practice pentru diverse aplicații, la fel ca și decotoarele de sârmă pentru cablurile mai mari, tăietoarele laterale și cleștii mici cu vârf de ac pentru cablurile mai mici. Veți avea nevoie de o unealtă pentru elice pentru a potrivi elicele. Cea mai importantă unealtă este deja inclusă în trusa practică de unelte Ethix.
Un instrument util pentru fiecare pilot FPV:
Acum că am rezolvat această problemă, este timpul să construim drona FPV.
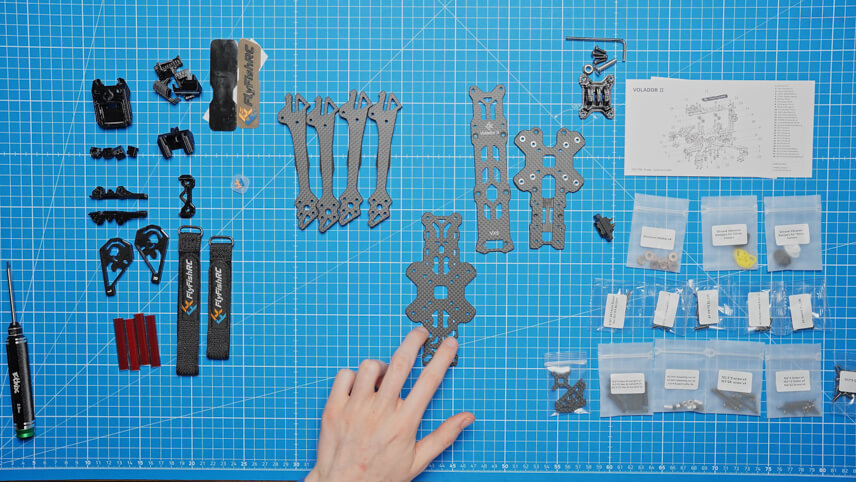
Să începem prin asamblarea cadrului. În primul rând, despachetați toate piesele pentru a obține o imagine de ansamblu bună. Așezați cele patru brațe ale cadrului astfel încât acestea să formeze o cruce în centru. O mică piesă suplimentară ajută la fixarea brațelor în centru, ceea ce facilitează înșurubarea lor ulterioară. Apăsați această piesă suplimentară ferm în centru, astfel încât brațele să fie apropiate.
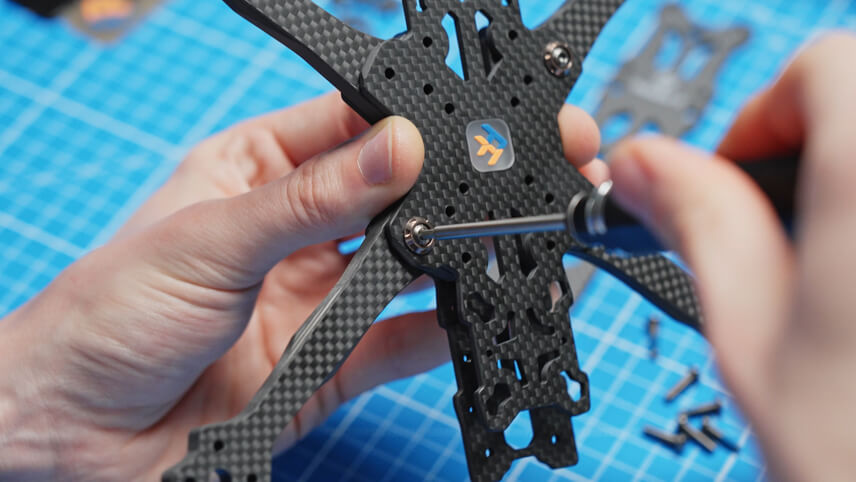
Veți avea nevoie de șuruburi M3x12 pentru a fixa brațele. Întoarceți copterul și asigurați-vă că logo-ul FlyFish este poziționat corect. Utilizați șaibe de aluminiu pentru a fixa brațele. Utilizați mai întâi găurile exterioare, apoi șuruburile M3x28 mai lungi pentru găurile interioare. Lăsați aceste șuruburi libere până când sunt montate toate șuruburile, apoi strângeți-le.
De îndată ce toate șuruburile sunt strânse, intră în joc primele piese TPU imprimate 3D. În primul rând, montați un suport pentru antenă în partea din spate. Folosiți șuruburi M2x12 și o șurubelniță hexagonală de 1,5 mm pentru a înșuruba suportul în cadru de jos. Din nou, lăsați totul liber și strângeți doar la sfârșit.
În continuare, montăm suportul pentru cameră. Aceasta constă din două plăci de carbon, două piese din aluminiu și o buză mică din TPU. Mai întâi apăsați plăcile de carbon în cadru. Apoi atașați piesele de aluminiu la plăcile de carbon, dar înșurubați-le doar lejer, astfel încât camera încă să încapă între ele.

Acum este timpul pentru standoffs, distanțierele pentru diferitele niveluri ale cadrului. Există dimensiuni diferite: mari, puțin mai mici și foarte mici pentru suportul GPS. În primul rând, fixați standoffs-urile mari pe cadru de sus cu ajutorul șuruburilor M3x16. Două sunt plasate în centrul cadrului și alte două în spate. Standoff-urile mai mici, pe care le fixați cu șuruburi M2.5x9, merg în spate.
Acum pregătim motoarele. Noi folosim motoare iFlight Xing2 2306 cu 1755 KV. Mai întâi apăsați protecțiile de brațe TPU pe brațele cadrului pentru a proteja carbonul și motoarele. Apoi luați un motor, țineți-l de braț și strângeți încet primele șuruburi. Asigurați-vă că motorul stă drept pe braț, astfel încât filetul să nu fie deteriorat. De asemenea, trebuie să vă asigurați că șuruburile nu ating înfășurările motorului. Repetați acest pas pentru toate cele patru motoare.

Acum este rândul controlerului de zbor și al ESC-ului. Mai întâi scoateți totul din ambalaj: conectorul XT60, șuruburile, cablurile de rezervă și amortizoarele de silicon. Controlerul, cunoscut și sub numele de ESC, este cipul la care sunt conectate toate motoarele. Controlerul de zbor este "creierul" dronei, la care sunt conectate ulterior toate componentele.
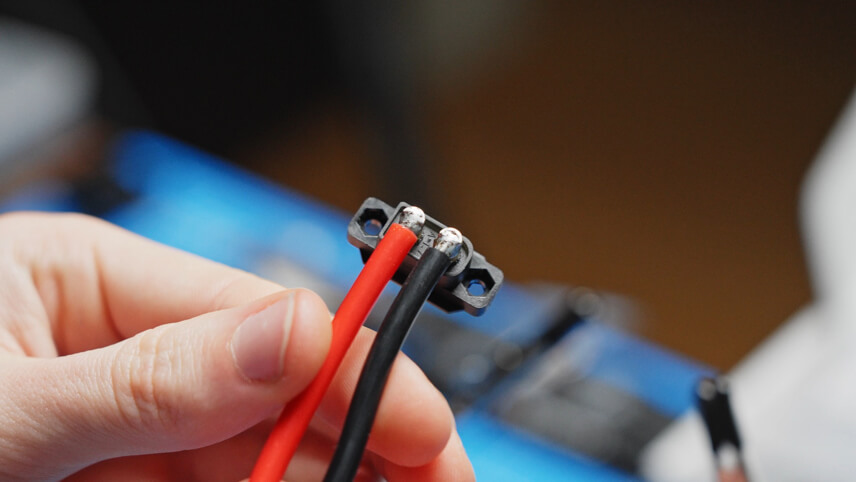
Pentru a conecta cablurile conectorului XT60 la un unghi de 90°, mai întâi pre-sudăm contactele conectorului. De altfel, folosim conectorul XT60 care a venit cu rama.
Cablurile sunt, de asemenea, pre-sudate. Apoi lipim cablurile la contactele conectorului XT60. Asigurați-vă că nimic nu se atinge între cele două contacte.
Condensatorul este plasat în cadru de jos, cu plusul lipit la plus și minusul la minus. A trebuit să luăm un condensator mai mic (în ceea ce privește dimensiunea), deoarece cel de la ESC nu încape în cadru.
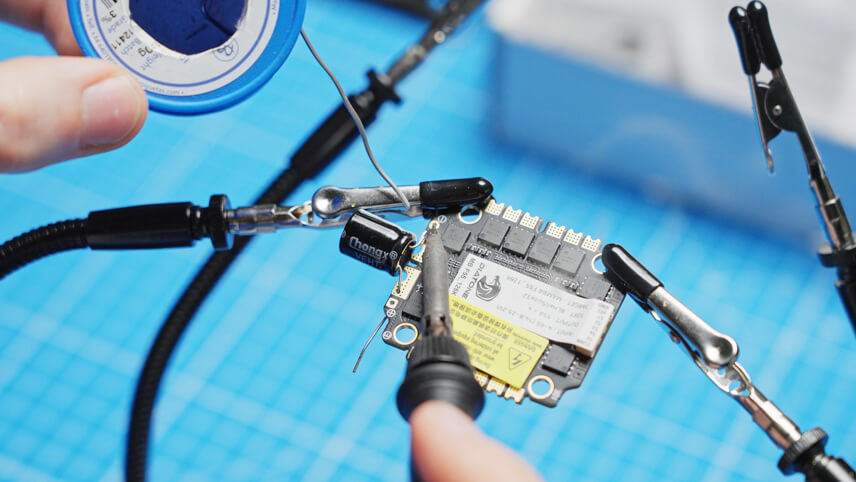
Tăiați picioarele proeminente ale condensatorului. Apoi puteți pregăti punctele de lipire pentru cablurile de alimentare de pe ESC și lipiți și cablurile de alimentare.
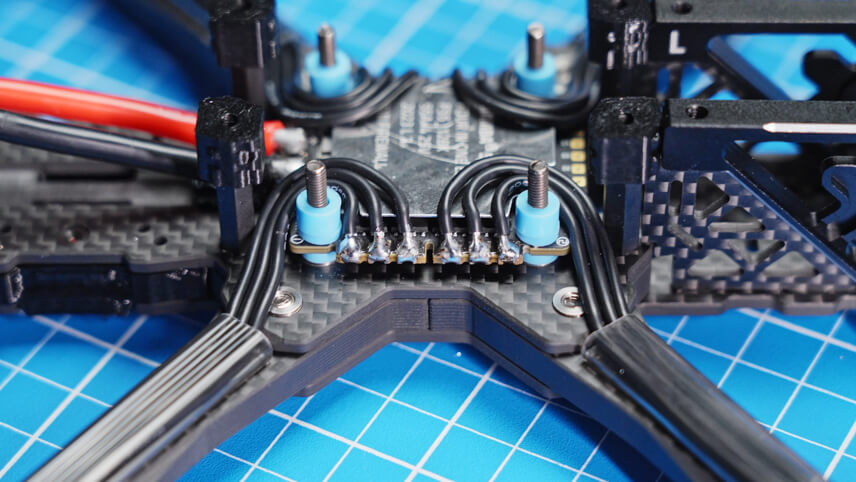
Acum montăm ESC-ul în cadru. Pentru a face acest lucru, trageți amortizoarele de silicon prin orificiile din cadru. Cele trei conexiuni pentru fiecare motor sunt pre-sudate. Apoi atașați protectorii de cablu ai motorului și introduceți cablurile prin acești protectori înainte de a le lipi la ESC. Este important ca cablurile să nu se atingă între ele și să fie conectate numai la plăcuța de lipit respectivă.
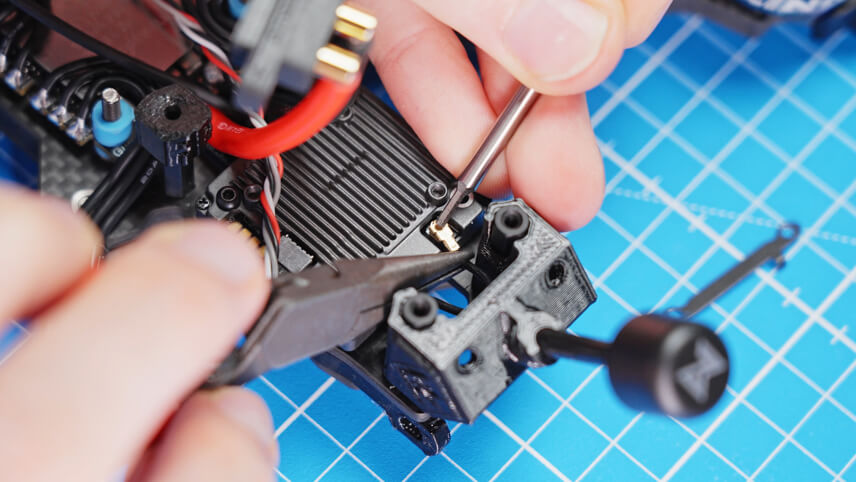
Urmează sistemul emițătorului video. Noi folosim Walksnail Avatar HD Kit V2, format din antenă, transmițător video și cameră. Transmițătorul video este montat în partea din spate a cadrului, iar camera în partea din față. Cablurile sunt așezate astfel încât transmițătorul video să poată fi poziționat corect. Utilizați șuruburile și șaibele furnizate pentru a înșuruba transmițătorul video în poziție.
Îndepărtați placa de acoperire a transmițătorului video pentru a expune conexiunea U.FL. Atașați antena la suport și conectați antena la transmițătorul video. Montați din nou placa și strângeți șuruburile.
Pentru a conecta transmițătorul video la controlerul de zbor, lipiți cablul roșu la plăcuța 9V, cablul negru la plăcuța GND, cablul TX gri la plăcuța RX3 și cablul RX alb la plăcuța TX3 a controlerului de zbor. Asigurați-vă că RX și TX sunt conectate corect pentru a asigura o comunicare fără probleme. Diagrama exactă poate fi găsită în instrucțiunile FC și ale transmițătorului video.
Transmițătorul video este acum complet instalat, iar conectorul XT60 poate fi presat pe standoff-urile din spate.
Introduceți amortizoarele din silicon în partea laterală a controlerului de zbor și conectați cablul controlerului la controlerul de zbor. Montați controlerul de zbor în cadru și fixați-l cu piulițele furnizate.
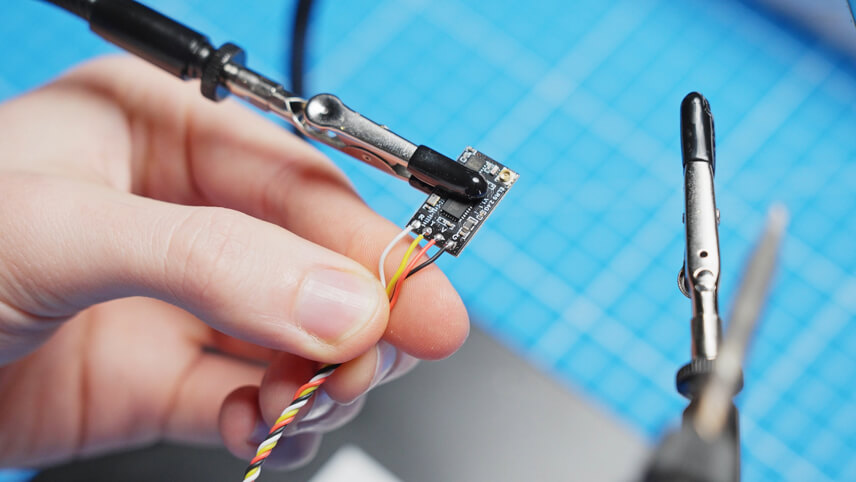
Acum se instalează receptorul. Noi folosim un receptor ELRS, care este conectat într-un mod similar cu transmițătorul video. Consultați instrucțiunile pentru a găsi atribuirea corectă a conexiunilor. În mod normal, conexiunile sunt GND (negru), 5V (roșu), TX (gri) și RX (alb). Aceste cabluri sunt lipite la conexiunea UART1 a controlerului de zbor: TX la RX, RX la TX, 5V la 5V și GND la GND. Tubul termocontractabil protejează atât placa, cât și cablurile. Montați receptorul în spatele camerei trăgând antena sub cameră și fixând totul cu legături de cablu. Alternativ, puteți utiliza bandă adezivă cu două fețe.
Următorul pas este să montați placa superioară. Pentru aceasta se folosesc diferite șuruburi: șuruburi M2,5 în partea din spate, șuruburi adâncite în centru și șuruburi cu un cap mai lat pentru suportul GoPro în partea din față. Aceste șuruburi speciale împiedică ruperea TPU în cazul unei căzături. Strângeți toate șuruburile, dar nu exagerați pentru a evita deteriorarea. De asemenea, montați suportul pentru baterie aliniindu-l corect și apăsându-l în jos pentru a preveni alunecarea bateriei.
Înainte de a trece la configurarea software-ului, să testăm electronica. Conectați un dop de fum între baterie și dronă pentru a detecta orice conexiuni greșite fără a deteriora componentele. Când toate LED-urile de pe receptor, controlerul de zbor și transmițătorul video se aprind, sunteți gata pentru configurare.

Pentru a configura copterul, veți avea nevoie de două programe pe computer: configuratorul ExpressLRS pentru receptor și configuratorul Betaflight pentru controlerul de zbor.
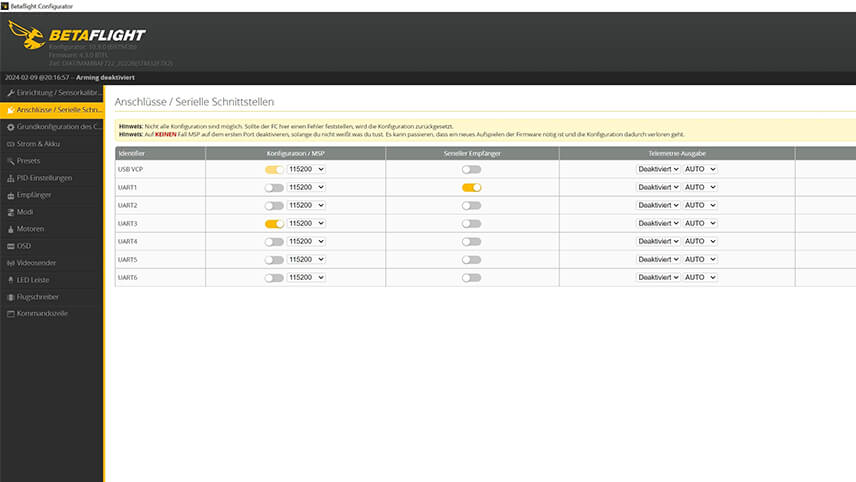
Începeți cu Betaflight. Conectați-vă la controlerul de zbor și asigurați-vă că receptorul este setat la UART1 și transmițătorul video la UART3. Activați conexiunile corespunzătoare și salvați configurația.
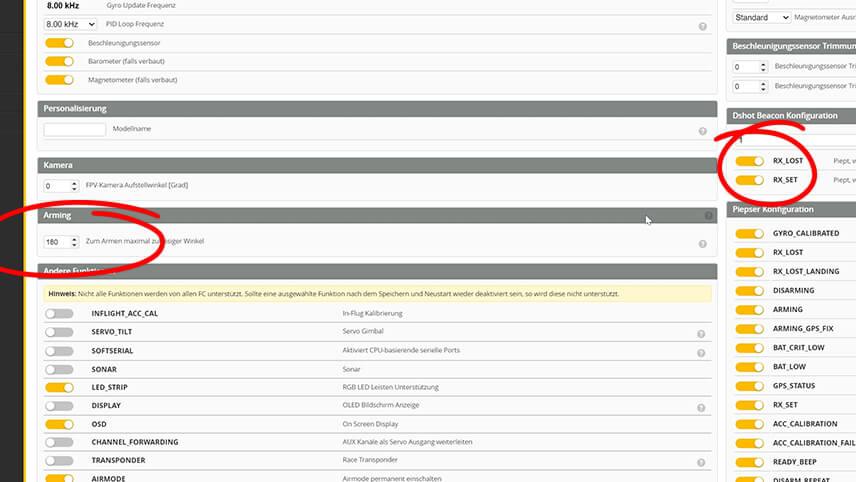
În configurația de bază, setați unghiul de armare la 180°, astfel încât drona să poată decola în orice direcție. Activați RX_LOST și RX_SET astfel încât motoarele să emită un semnal sonor dacă conexiunea este pierdută. Salvați setările. Sub "Receptor", selectați CRSF, protocolul de recepție ELRS.
Treceți la configuratorul ExpressLRS. Selectați versiunea corectă și receptorul corespunzător. Conectați și instalați firmware-ul. Acest lucru poate dura câteva minute. Dacă instalarea a avut succes, puteți comuta înapoi la Betaflight și puteți testa conexiunea. Mișcați stick-urile de pe telecomandă și verificați dacă deviațiile sunt vizibile în Betaflight.
Treceți la modurile de zbor în Betaflight și adăugați modurile Pre-Arm, Arm și Angle. Atribuiți comutatoarele corespunzătoare pe telecomandă făcând clic pe "Add Range" (Adăugați interval) și mișcând comutatoarele. Asigurați-vă că intervalele sunt setate corect, astfel încât modurile să fie active numai atunci când comutatoarele sunt apăsate. Salvați setările și testați dacă comutatoarele sunt afișate corect în Betaflight atunci când le deplasați pe telecomandă.
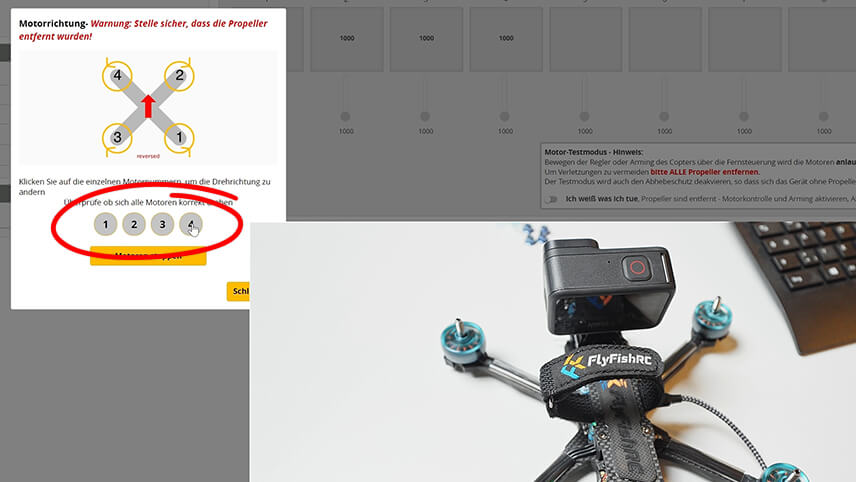
În fila "Motoare" din Betaflight, verificați direcția de rotație a motoarelor. Asigurați-vă că elicele sunt scoase și activați comutatorul care activează controlul motoarelor. Conectați bateria și bifați caseta "Reverse motors". Pentru că vrem să scoatem elicele din direcția de rotație. Testați direcția de rotație a motoarelor și faceți clic pe numărul motorului respectiv pentru a schimba direcția de rotație dacă nu este corectă. Salvați setările și asigurați-vă că toate motoarele se rotesc conform destinației.
În OSD (On-Screen Display - Afișare pe ecran), setați elementele care urmează să fie afișate în ochelari. Activați tensiunea medie a celulei, modul de zbor, temporizatoarele 1 și 2, precum și valoarea RSSI și calitatea conexiunii. Setați formatul video la HD pentru a afișa elementele în locurile potrivite.
În cele din urmă, trebuie conectați ochelarii și transmițătorul video. Porniți drona și așteptați până când transmițătorul video clipește în verde. Apoi apăsați butonul mic de pe transmițătorul video și de pe ochelari până când ambele sunt conectate.

În cele din urmă, montați elicele. Noi folosim elicele Gemfan Hurricane în albastru. Aranjați elicele astfel încât să se întoarcă spre exterior pentru a evita aruncarea de murdărie în cameră. Aceasta corespunde direcției de rotație a motorului stabilită anterior. Atașați elicele cu piulițele incluse și strângeți-le cu unealta pentru elice.

Acum sunteți gata pentru primul zbor de testare! Porniți telecomanda, alimentați ochelarii cu energie și conectați bateria la dronă. verificați sunetul dronei în zbor și asigurați-vă că nu auziți nicio vibrație neobișnuită. Fiți cu ochii pe tensiunea bateriei pentru a nu o descărca prea adânc. Dacă totul merge bine, v-ați construit cu succes propria dronă FPV!
Dacă aveți nevoie de mai multe sfaturi pentru primul dvs. zbor, aruncați o privire la videoclipul nostru. Puteți găsi toate piesele și instrumentele în magazinul nostru. Distracție plăcută la zbor și vă rugăm să ne lăsați un like și un abonament!