Uusi vuosi, uusi rakennus! Tässä artikkelissa näytämme sinulle, miten koota 5-tuumainen HD FPV -droni elokuvamaisia otoksia ja freestylea varten ja mitä tarvitset siihen.
Kaikki käytetyt osat ovat luonnollisesti saatavilla myymälästämme, ja se auttaa meitä valtavasti, jos piipahdat siellä. Kiitos!
Tämä blogikirjoitus on saatavilla myös videona. Klikkaa yllä olevaa play-painiketta tai käy katsomassa YouTube-kanavamme.
Tarvitsemme useita tärkeitä komponentteja FPV-dronen rakentamiseen. Perusrakennuspalikoita ovat runko, joka muodostaa lennokin rakenteen, ja vastaanotin, joka vastaanottaa ohjaussignaalit. Neljä moottoria pyörittää potkureita, kun taas videolähetin ja kamera välittävät suoraa kuvaa FPV-laseihin. Lisäksi tarvitaan lennonohjain, lennokin "aivot", ja ohjain, joka ohjaa moottoreiden virransyöttöä.
Näitä komponentteja tarvitaan FPV-dronen rakentamiseen:

Videokuvan vastaanottamiseen suosittelemme Walksnail Avatar Goggles X:ää, joka on yksi suosituimmista HD FPV -laseista. Käytämme Jumper T20 V2 -kauko-ohjainta. Se, mitä radiota tarkalleen ottaen käytät, ei ole niin tärkeää. Sen on kuitenkin tuettava ELRS-lähetysprotokollaa. Akkuna käytetään kiinalaisen Hobbyline 6S LiPo-akkua, koska rakennamme 6S-yhteensopivan kopterin.
Tämä on käyttämämme laitteisto:
Tarvitset myös valikoiman työkaluja rakentamista varten. Juotosrauta on välttämätön, mieluiten kunnon juotosasema, sekä juotetta. Lämpökutisteputken kutistamiseen voidaan käyttää sytytintä tai kuumailmapuhallinta. Kaapelisiteet ovat käytännöllisiä eri sovelluksissa, samoin kuin kuorintapihdit isommille kaapeleille, sivuleikkurit ja pienet neulapihdit pienemmille kaapeleille. Tarvitset potkurityökalun potkureiden asentamiseen. Tärkein työkalu on jo mukana käytännöllisessä Ethix-työkalulaukussa.
Hyödyllinen työkalu jokaiselle FPV-pilotille:
Nyt kun tämä on saatu pois tieltä, on aika rakentaa FPV-drone.
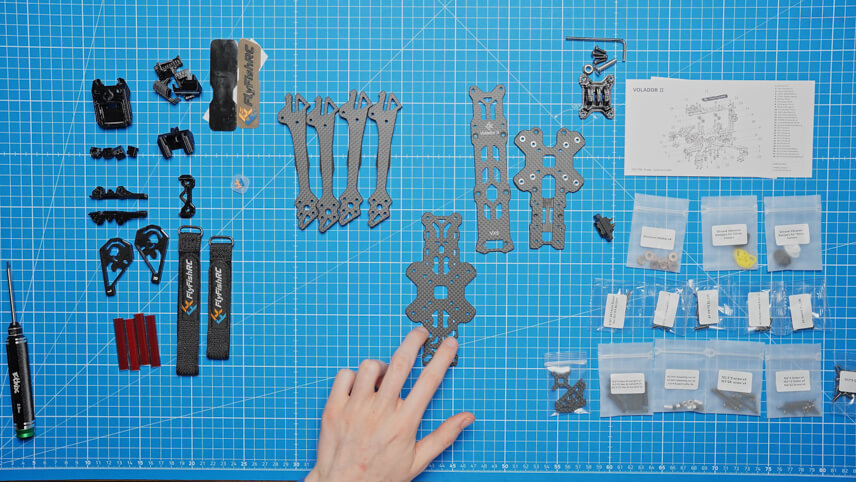
Aloitetaan kokoamalla runko. Pura ensin kaikki osat, jotta saat hyvän yleiskuvan. Aseta rungon neljä käsivartta niin, että ne muodostavat ristin keskelle. Pieni plus-osa auttaa kiinnittämään varret keskelle, mikä helpottaa niiden yhteenruuvaamista myöhemmin. Paina tämä plusosa tiukasti keskelle niin, että varret ovat lähellä toisiaan.
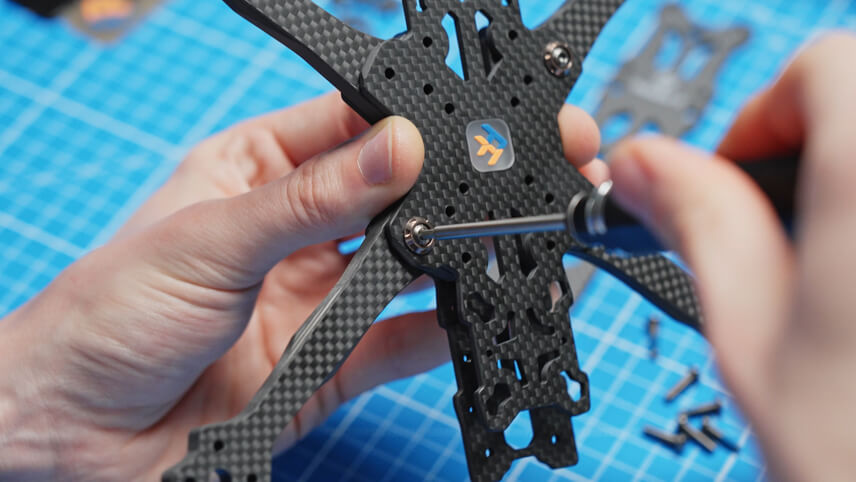
Tarvitset M3x12-ruuveja varsien kiinnittämiseen. Käännä kopteri ympäri ja varmista, että FlyFish-logo on oikeassa asennossa. Käytä alumiinisia aluslevyjä varsien kiinnittämiseen. Käytä ensin ulompia reikiä ja sitten pidempiä M3x28-ruuveja sisempiin reikiin. Jätä nämä ruuvit löysälle, kunnes kaikki ruuvit on asennettu, ja kiristä ne sitten.
Kun kaikki ruuvit on kiristetty, ensimmäiset 3D-tulostetut TPU-osat tulevat käyttöön. Asenna ensin antennin kiinnike takaosaan. Käytä M2x12-ruuveja ja 1,5 mm:n kuusiokoloavainta ruuvataaksesi kiinnikkeen runkoon alhaaltapäin. Jätä jälleen kaikki löysälle ja kiristä vasta lopussa.
Seuraavaksi kiinnitämme kameran kiinnikkeen. Se koostuu kahdesta hiililevystä, kahdesta alumiiniosasta ja pienestä TPU-huulista. Paina ensin hiililevyt runkoon. Kiinnitä sitten alumiiniosat hiililevyihin, mutta ruuvaa ne vain löysästi kiinni niin, että kamera mahtuu vielä niiden väliin.

Nyt on aika ottaa käyttöön standoffit, eli välikappaleet rungon eri tasoja varten. Niitä on eri kokoja: suuria, hieman pienempiä ja hyvin pieniä GPS-kiinnitystä varten. Kiinnitä ensin suuret standoffit kehykseen ylhäältäpäin M3x16-ruuveilla. Kaksi asetetaan rungon keskelle ja kaksi muuta taakse. Pienemmät jalustat, jotka kiinnität M2,5x9-ruuveilla, tulevat taakse.
Nyt valmistelemme moottorit. Käytämme iFlight Xing2 2306 -moottoreita, joissa on 1755 KV. Paina ensin TPU-varsisuojat rungon varsiin suojaamaan hiiltä ja moottoreita. Ota sitten moottori, pidä sitä varteen kiinni ja kiristä hitaasti ensimmäiset ruuvit. Varmista, että moottori istuu suorassa varressa, jotta kierre ei vahingoitu. Varmista myös, että ruuvit eivät kosketa moottorin käämejä. Toista tämä vaihe kaikille neljälle moottorille.

Nyt on lennonohjaimen ja ESC:n vuoro. Ota ensin kaikki pois pakkauksesta: XT60-liitin, ruuvit, varakaapelit ja silikonivaimentimet. Ohjain, joka tunnetaan myös nimellä ESC, on siru, johon kaikki moottorit on liitetty. Lennonohjain on lennokin "aivot", johon kaikki komponentit liitetään myöhemmin.
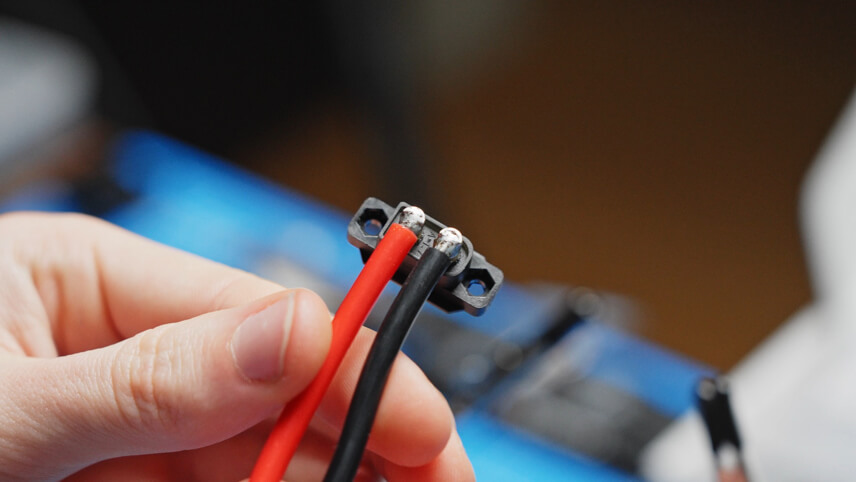
Jotta XT60-liittimen kaapelit voidaan liittää 90° kulmassa, juotamme ensin liittimen koskettimet valmiiksi. Käytämme muuten XT60-liitintä, joka tuli rungon mukana.
Kaapelit on myös esijuotettu. Juota sitten kaapelit XT60-liittimen koskettimiin. Varmista, että mikään ei kosketa kahden kosketuspisteen väliin.
Kondensaattori asetetaan kehykseen alhaaltapäin, plus juotetaan plussaan ja miinus miinukseen. Jouduimme hankkimaan pienemmän kondensaattorin (kooltaan), koska ESC:stä tuleva ei mahdu kehykseen.
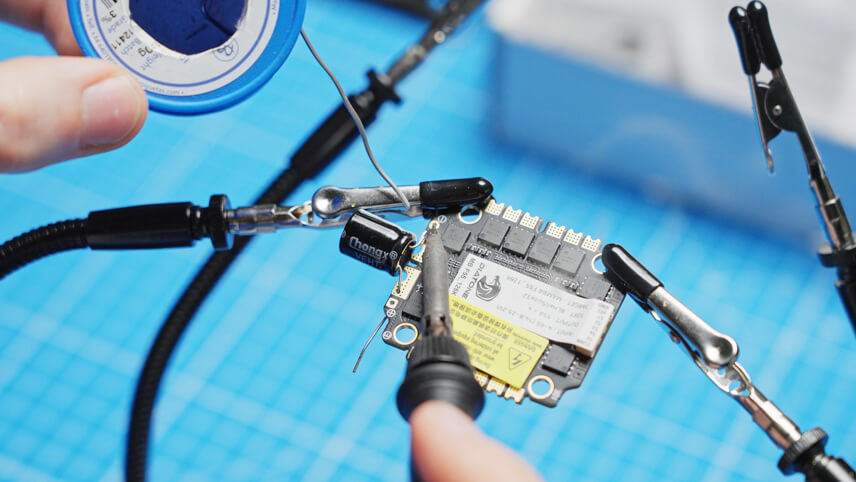
Leikkaa kondensaattorin ulkonevat jalat pois. Sitten voit valmistella ESC:n virtajohtojen juotospisteet ja juottaa myös virtajohdot.
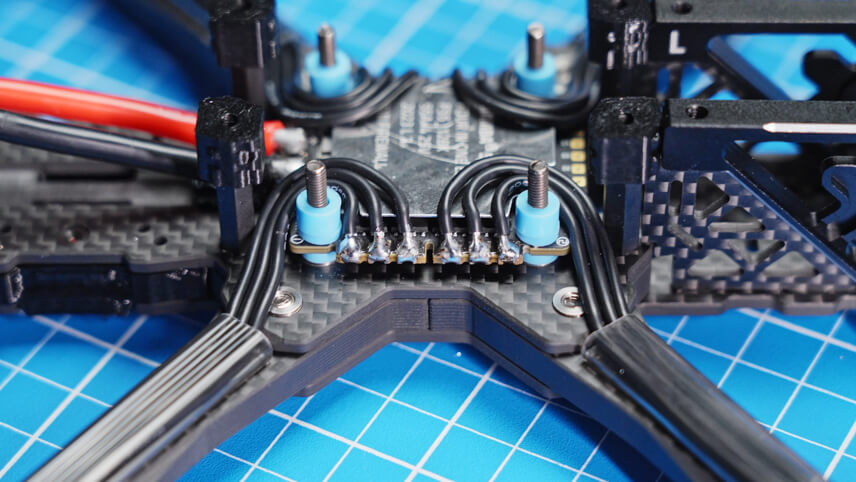
Nyt asennamme ESC:n runkoon. Vedä tätä varten silikonivaimentimet rungossa olevien reikien läpi. Moottorikohtaiset kolme liitäntää on juotettu valmiiksi. Kiinnitä sitten moottorien kaapelisuojat ja työnnä kaapelit näiden suojien läpi ennen niiden juottamista ESC:hen. On tärkeää, että kaapelit eivät koske toisiinsa ja että ne on liitetty vain kulloiseenkin juotosalustaan.
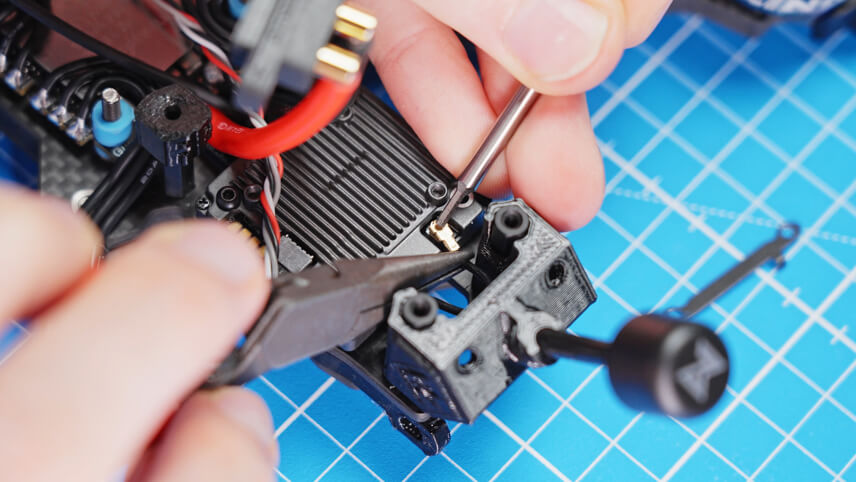
Seuraavaksi on vuorossa videolähetinjärjestelmä. Käytämme Walksnail Avatar HD Kit V2:ta, joka koostuu antennista, videolähettimestä ja kamerasta. Videolähetin asennetaan rungon takaosaan ja kamera etupuolelle. Kaapelit on asennettu niin, että videolähetin voidaan sijoittaa oikein. Ruuvaa videolähetin paikalleen mukana toimitetuilla ruuveilla ja aluslevyillä.
Poista videolähettimen peitelevy, jotta U.FL-liitäntä tulee näkyviin. Kiinnitä antenni kiinnikkeeseen ja kytke antenni videolähettimeen. Asenna levy takaisin paikalleen ja kiristä ruuvit.
Jos haluat liittää videolähettimen lennonohjaimeen, juota punainen kaapeli 9V-läpivientiin, musta kaapeli GND-läpivientiin, harmaa TX-kaapeli RX3-läpivientiin ja valkoinen RX-kaapeli lennonohjaimen TX3-läpivientiin. Varmista, että RX ja TX on kytketty oikein sujuvan viestinnän varmistamiseksi. Tarkka kaavio löytyy FC- ja videolähettimen ohjeista.
Videolähetin on nyt täysin asennettu ja XT60-liitin voidaan painaa takana oleviin jalustoihin.
Aseta silikonivaimentimet lennonohjaimen kylkeen ja liitä ohjaimen kaapeli lennonohjaimeen. Asenna lennonohjain runkoon ja kiinnitä se mukana toimitetuilla muttereilla.
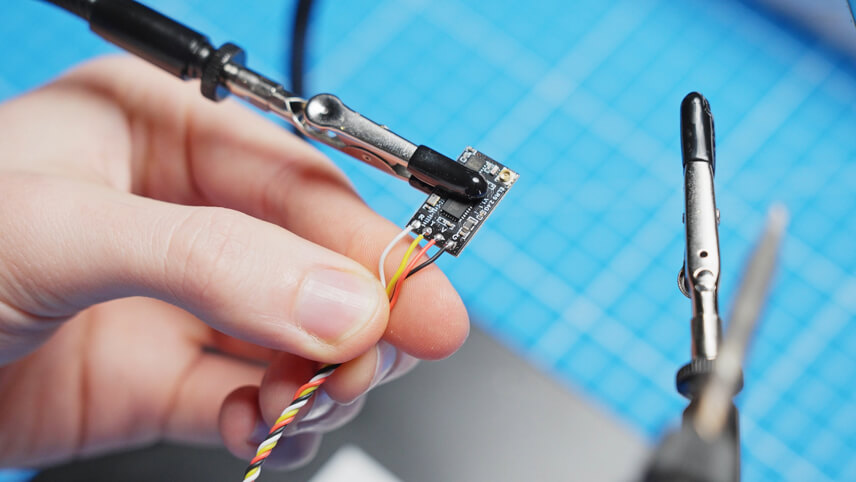
Nyt vastaanotin on asennettu. Käytämme ELRS-vastaanotinta, joka kytketään samalla tavalla kuin videolähetin. Katso ohjeista liitäntöjen oikea kohdistus. Normaalisti liitännät ovat GND (musta), 5V (punainen), TX (harmaa) ja RX (valkoinen). Nämä kaapelit juotetaan lennonohjaimen UART1-liitäntään: TX - RX, RX - TX, 5V - 5V ja GND - GND. Kutisteputki suojaa sekä piirilevyä että kaapeleita. Asenna vastaanotin kameran taakse vetämällä antenni kameran alle ja kiinnittämällä kaikki kaapelisiteillä. Vaihtoehtoisesti voit käyttää kaksipuolista teippiä.
Seuraava vaihe on ylälevyn asentaminen. Tähän käytetään erilaisia ruuveja: M2,5-ruuveja takana, uppokantaruuveja keskellä ja ruuveja, joissa on leveämpi pää GoPro-kiinnitystä varten, edessä. Nämä erikoisruuvit estävät TPU:ta repeämästä irti putoamisen yhteydessä. Kiristä kaikki ruuvit, mutta älä liioittele vahingoittumisen välttämiseksi. Kiinnitä myös akkutyyny kohdistamalla se oikein ja painamalla se alas, jotta akku ei pääse liukumaan.
Ennen kuin siirrymme ohjelmistokokoonpanoon, testataan elektroniikka. Kytke akun ja lennokin väliin savusulku, jotta voit havaita mahdolliset väärät kytkennät vahingoittamatta komponentteja. Kun kaikki vastaanottimen, lennonohjaimen ja videolähettimen LEDit syttyvät, olet valmis konfigurointiin.

Kopterin konfigurointiin tarvitset tietokoneellasi kaksi ohjelmaa: ExpressLRS-konfiguraattorin vastaanottimelle ja Betaflight-konfiguraattorin lennonohjaimelle.
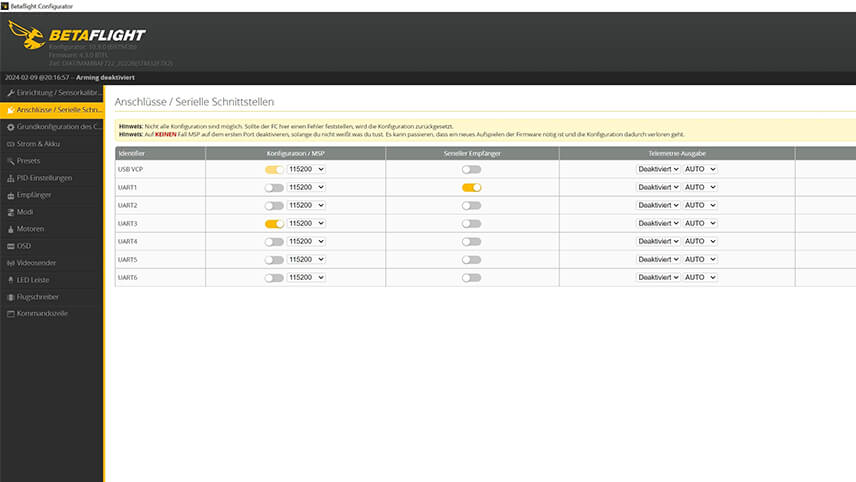
Aloita Betaflightilla. Yhdistä lennonohjaimeen ja varmista, että vastaanotin on asetettu UART1:een ja videolähetin UART3:een. Aktivoi vastaavat liitännät ja tallenna konfiguraatio.
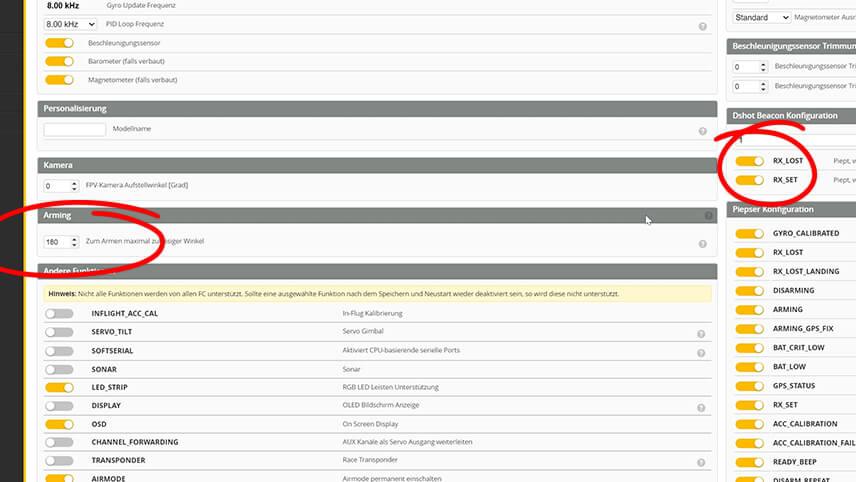
Aseta peruskonfiguraatiossa aseistuskulmaksi 180°, jotta lennokki voi lähteä lentoon mihin suuntaan tahansa. Aktivoi RX_LOST ja RX_SET, jotta moottorit piippaavat, jos yhteys katkeaa. Tallenna asetukset. Valitse kohdassa "Receiver" (vastaanotin) CRSF, ELRS-vastaanottimen protokolla.
Siirry ExpressLRS-konfiguraattoriin. Valitse oikea versio ja sopiva vastaanotin. Yhdistä ja asenna laiteohjelmisto. Tämä voi kestää muutaman minuutin. Jos asennus onnistui, voit siirtyä takaisin Betaflightiin ja testata yhteyden. Liikuta tikkuja kauko-ohjaimella ja tarkista, näkyvätkö taipumat Betaflightissa.
Siirry Betaflightissa lentotiloihin ja lisää Pre-Arm-, Arm- ja Angle-tilat. Määritä vastaavat kytkimet kaukosäätimessä napsauttamalla "Add Range" ja siirtämällä kytkimiä. Varmista, että alueet on asetettu oikein niin, että tilat ovat aktiivisia vain, kun kytkimiä käännetään. Tallenna asetukset ja testaa, näkyvätkö kytkimet oikein Betaflightissa, kun siirrät niitä kaukosäätimellä.
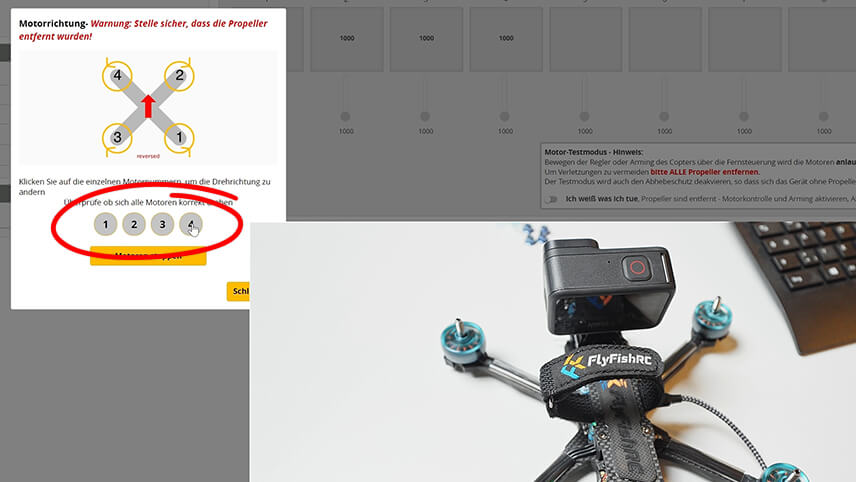
Tarkista Betaflightin "Motors"-välilehdeltä moottoreiden pyörimissuunta. Varmista, että potkurit on irrotettu ja aktivoi kytkin, joka ottaa moottorinohjauksen käyttöön. Kytke akku ja laita rasti ruutuun "Reverse motors". Koska haluamme potkureiden pyörimissuunnan ulos. Testaa moottoreiden pyörimissuunta ja napsauta kyseisen moottorin numeroa vaihtaaksesi pyörimissuuntaa, jos se ei ole oikea. Tallenna asetukset ja varmista, että kaikki moottorit pyörivät tarkoitetulla tavalla.
Aseta OSD:ssä (On-Screen Display) elementit, jotka näytetään suojalaseissa. Aktivoi keskimääräinen kennojännite, lentotila, ajastin 1 ja 2 sekä RSSI-arvo ja yhteyden laatu. Aseta videoformaatiksi HD, jotta elementit näkyvät oikeissa paikoissa.
Lopuksi suojalasit ja videolähetin on kytkettävä. Kytke drone päälle ja odota, kunnes videolähetin vilkkuu vihreänä. Paina sitten pientä painiketta videolähettimessä ja suojalaseissa, kunnes molemmat on yhdistetty.

Asenna lopuksi potkurit. Käytämme sinisiä Gemfan Hurricane -potkureita. Järjestä potkurit niin, että ne kääntyvät ulospäin, jotta kameraan ei pääse heittämään likaa. Tämä vastaa aiemmin määritettyä moottorin pyörimissuuntaa. Kiinnitä potkurit mukana toimitetuilla muttereilla ja kiristä ne potkurityökalulla.

Nyt olet valmis ensimmäiseen koelentoon! Kytke kaukosäädin päälle, anna suojalaseille virtaa ja kytke akku lennoktiin. tarkista lennokin ääni lennon aikana ja varmista, ettet kuule mitään epätavallista tärinää. Pidä silmällä akun jännitettä, jotta akku ei purkaudu liian syvälle. Jos kaikki sujuu hyvin, olet onnistuneesti rakentanut oman FPV-dronen!
Jos tarvitset lisää vinkkejä ensimmäiseen lentoon, katso videomme. Löydät kaikki osat ja työkalut kaupastamme. Hauskaa lentämistä ja jätä meille tykkäys ja tilaus!